Progetto 11: Tank che Segue il Suono a Ultrasuoni
(1)Descrizione:
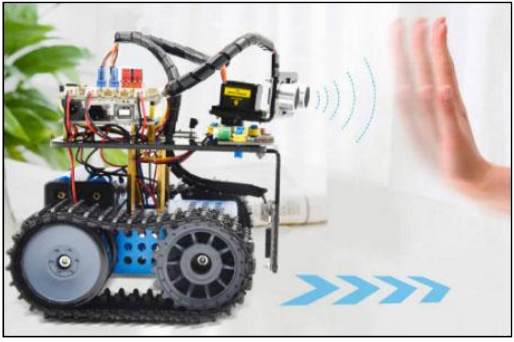
Nella lezione precedente, abbiamo imparato a conoscere l’auto intelligente che segue la luce. In questa lezione, possiamo combinare le conoscenze acquisite per realizzare un’auto che segue il suono a ultrasuoni. Nel progetto, utilizziamo sensori a ultrasuoni per rilevare la distanza tra l’auto e l’ostacolo davanti, e poi controlliamo la rotazione dei due motori in base a questi dati in modo da controllare i movimenti dell’auto intelligente.
La logica specifica dell’auto intelligente che segue il suono a ultrasuoni è mostrata nella tabella seguente:
Rilevamento |
Impostazione |
|---|---|
La distanza (cm) tra l’auto e l’ostacolo frontale |
Imposta l’angolo del servo a 90° |
Condizione |
Movimento |
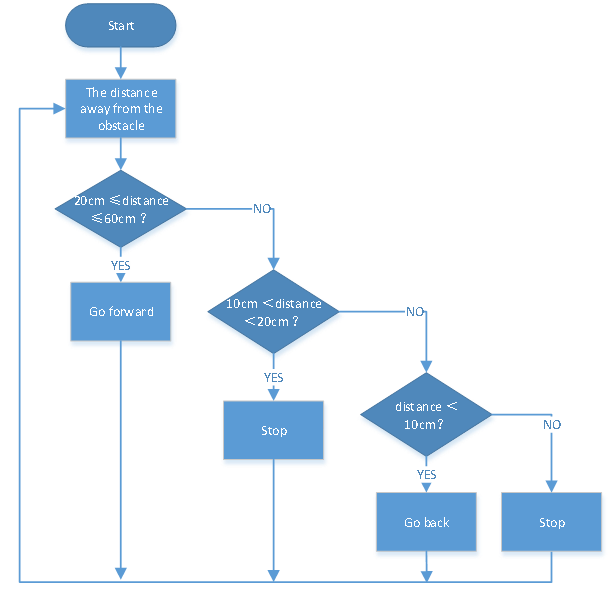
distanza≥20 e distanza≤50 |
Vai avanti |
10<distanza<20 |
Stop |
distanza≤10 |
Vai indietro |
(2)Diagramma di Flusso:
(3)Schema di Collegamento:
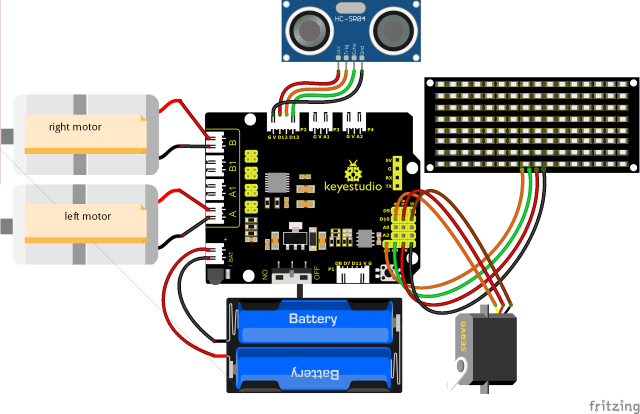
Nota: Il collegamento del sensore a ultrasuoni, del servo e del motore è lo stesso dell’esperimento del progetto precedente. GND, VCC, SDA e SCL del pannello LED 8x16 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 sulla scheda di espansione.
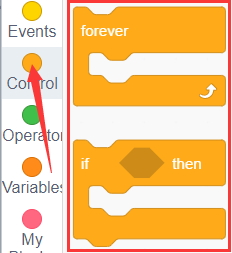
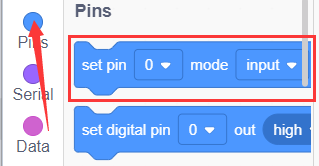
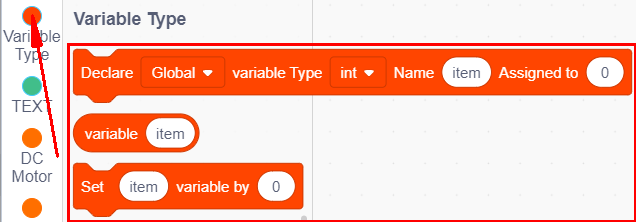
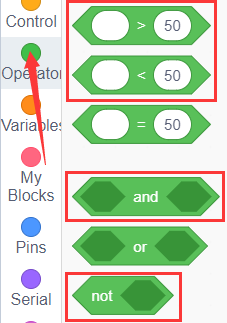
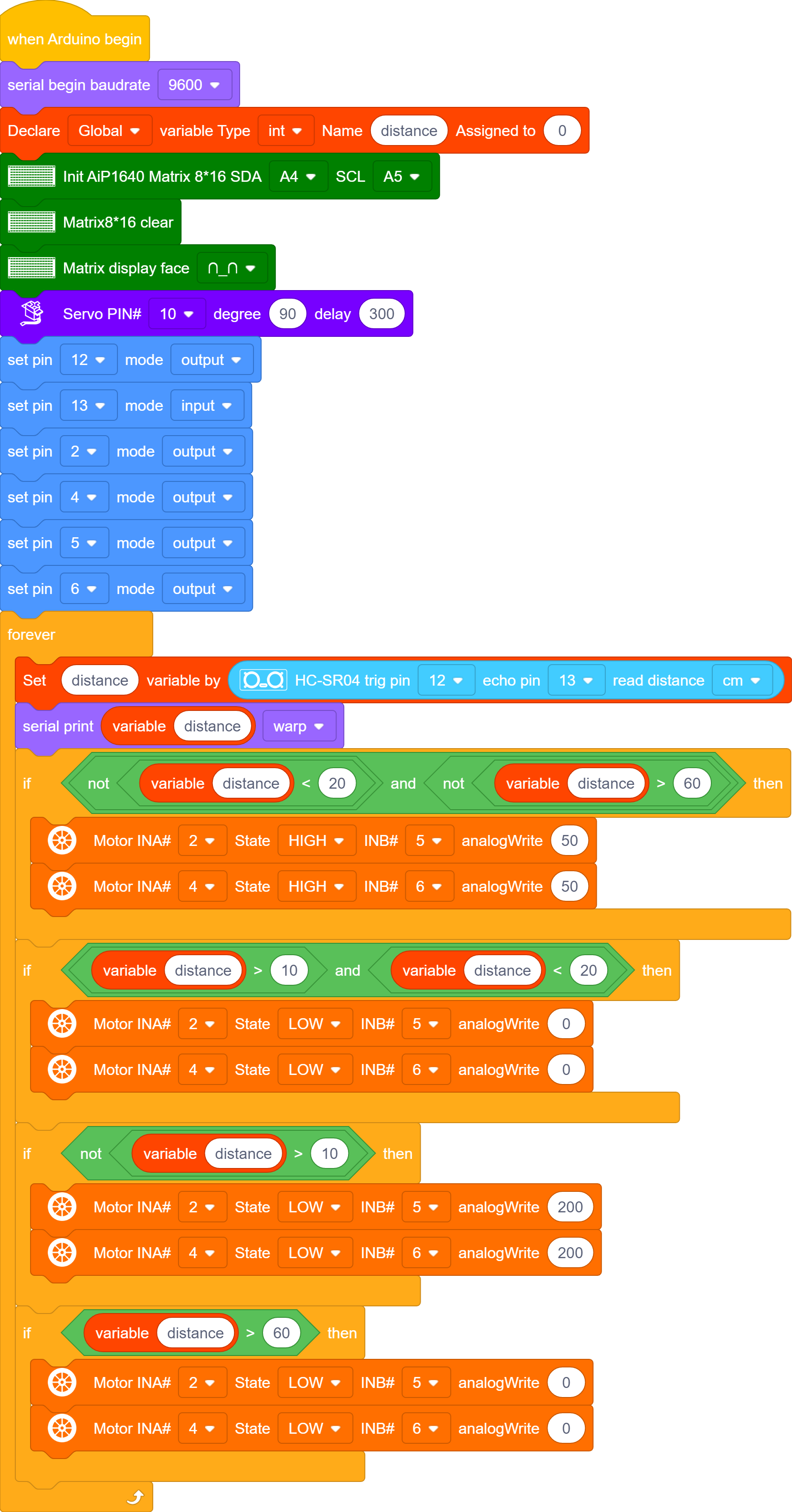
(4)Codice di Test:
Puoi anche trascinare i blocchi per modificare il tuo codice, come mostrato di seguito.
(1)
(2)
(3)
(4)
(5)
(6)
(7) 
(8) 
(9) 
(10) 
Codice di Test Completo
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, poiché il caricamento del codice utilizza anche la comunicazione seriale e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, causando il fallimento del caricamento.)
(5)Risultato del Test:
Carica il codice, alimenta il dispositivo e porta l’interruttore DIP su ON. Il servo ruoterà di 90°, il pannello LED 8X16 mostrerà  , e l’auto seguirà l’ostacolo durante il movimento.
, e l’auto seguirà l’ostacolo durante il movimento.