Progetto 17: Carro Armato Controllato via Bluetooth
(1)Descrizione:
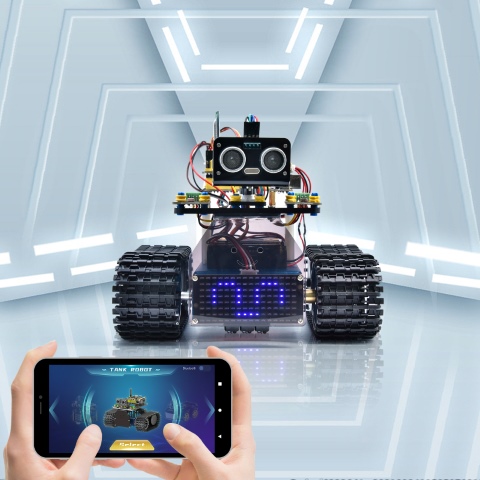
Abbiamo imparato le conoscenze di base del Bluetooth nel progetto precedente. In questa lezione, utilizzeremo il Bluetooth per controllare il robot. Poiché riguarda il Bluetooth, sono necessari un trasmettitore e un ricevitore. Nel progetto, usiamo il telefono cellulare come trasmettitore (master), e il robot connesso con il modulo Bluetooth HM-10 (slave) come ricevitore.
Abbiamo imparato in precedenza che inviare un bit può controllare i LED. Il principio per controllare questo robot è lo stesso.
Per controllare meglio il robot carro armato intelligente, abbiamo creato appositamente un’APP. In questa lezione, leggeremo tutti i valori dei tasti su questa APP tramite codice, e poi presenteremo l’APP esclusiva del nostro robot carro armato.
(2)Funzioni dei Tasti sull’APP:
La tabella seguente illustra le funzioni dei tasti corrispondenti:
Tasti |
Funzioni |
|
|---|---|---|
|
Associa e connette il modulo Bluetooth HM-10; clicca di nuovo per disconnettere |
|
|
seleziona il robot da controllare |
|
|
controllare i movimenti del robot tramite pulsanti |
|
|
Controllare i movimenti del robot tramite joystick |
|
|
Controllare i movimenti del robot tramite gravità |
|
|
Invia “F” quando premuto e “S” quando rilasciato |
Il robot si muove in avanti quando premuto e si ferma quando rilasciato |
|
Invia “L” quando premuto e “S” quando rilasciato |
Il robot gira a sinistra quando premuto e si ferma quando rilasciato |
|
Invia “R” quando premuto e “S” quando rilasciato |
Il robot gira a destra quando premuto e si ferma quando rilasciato |
|
Invia “B” quando premuto e “S” quando rilasciato |
Il robot va indietro quando premuto e si ferma quando rilasciato |
|
Invia “u”+cifra+“#” quando trascinato |
Trascina per cambiare la velocità del motore sinistro |
|
Invia “v”+cifra+“#” quando trascinato |
Trascina per cambiare la velocità del motore destro |
|
Seleziona per entrare nella pagina Funzioni |
|
|
Invia “G” quando premuto e “S” quando premuto di nuovo |
Entra in modalità evitamento ostacoli quando premuto ed esce quando premuto di nuovo |
|
Invia “h” quando premuto e “S” quando premuto di nuovo |
Entra in modalità inseguimento quando premuto ed esce quando premuto di nuovo |
|
Invia “e” quando premuto e “S” quando premuto di nuovo |
Entra in modalità segui-linea quando premuto ed esce quando premuto di nuovo |
|
Invia “f” quando premuto e “S” quando premuto di nuovo |
Entra in modalità movimento-in-spazio-confinato quando premuto ed esce quando premuto di nuovo |
|
Invia “i” quando premuto e “S” quando premuto di nuovo |
Entra in modalità inseguimento luce quando premuto ed esce quando premuto di nuovo |
|
Invia “j” quando premuto e “S” quando premuto di nuovo |
Entra in modalità estinzione incendio quando premuto ed esce quando premuto di nuovo |
|
Seleziona per entrare nella modalità visualizzazione espressioni facciali |
|
|
Invia “k” quando premuto e “z” quando premuto di nuovo |
Mostra il pattern sorridente quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Invia “l” quando premuto e “z” quando premuto di nuovo |
Mostra il pattern di disgusto quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Invia “m” quando premuto e “z” quando premuto di nuovo |
Mostra la faccia felice quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Invia “n” quando premuto e “z” quando premuto di nuovo |
Mostra il pattern triste quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Invia “o” quando premuto e “z” quando premuto di nuovo |
Mostra il pattern sprezzante quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Invia “p” quando premuto e “z” quando premuto di nuovo |
Mostra il pattern a forma di cuore quando cliccato e cancella l’espressione quando cliccato di nuovo |
|
Scegli per entrare nell’interfaccia delle funzioni personalizzate; ci sono sei tasti 1,2,3,4,5,6; con questi tasti puoi espandere alcune funzioni da solo |
|
|
Clicca per inviare “w” |
Clicca per visualizzare il valore analogico rilevato dalla fotoresistenza sinistra |
|
Clicca per inviare “y” |
Clicca per visualizzare il valore analogico rilevato dalla fotoresistenza destra |
|
Clicca per inviare “x” |
Clicca per mostrare la distanza rilevata dal sensore a ultrasuoni (unità: cm) |
|
Clicca per inviare “c” |
Premi per accendere il ventilatore e premi di nuovo per spegnerlo |


















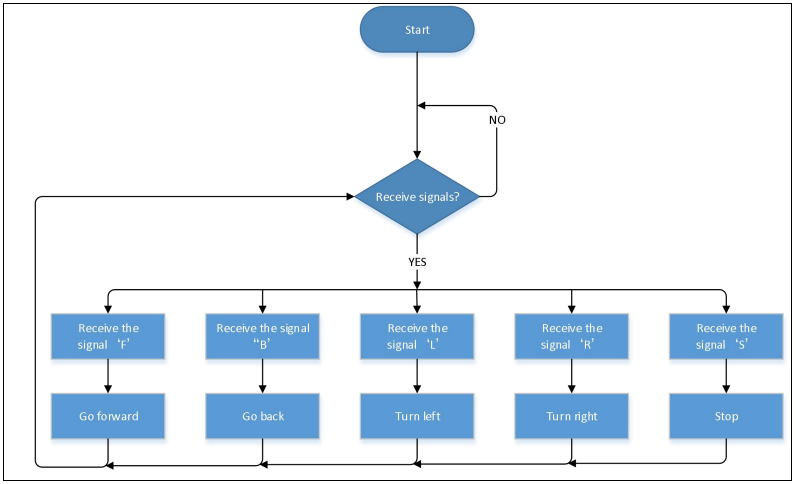
(3)Diagramma di Flusso:
(4)Schema di Collegamento:
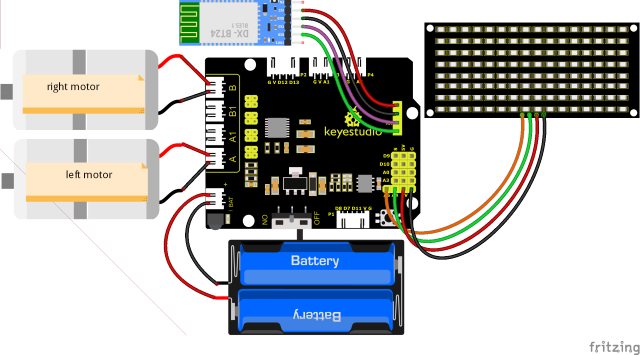
Nota:
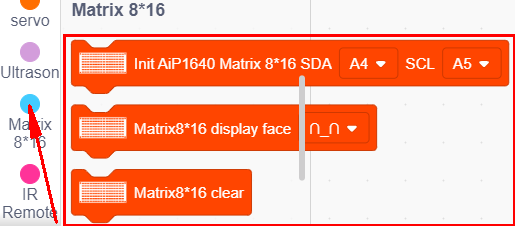
GND, VCC, SDA e SCL del pannello LED 8x16 sono collegati a G(GND), V(5V), A4 e A5 della scheda di espansione. STATE e BRK non devono essere collegati. Il modulo BT viene inserito nella scheda di espansione.
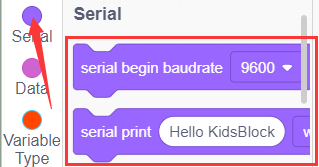
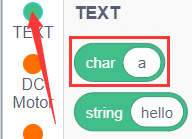
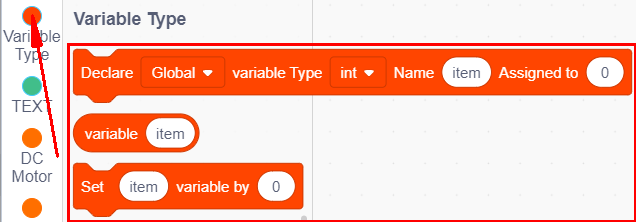
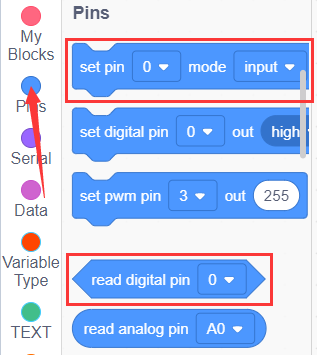
(5)Codice di Test:
Puoi trascinare i blocchi per modificare il codice
(1)
(2)
(3) 
(4)
(5)
(6) 
(7)
(8)
(9)
Codice di Test Completo
(Nota: Non connettere il modulo Bluetooth prima di caricare il codice, poiché il caricamento del codice utilizza anch’esso la comunicazione seriale, e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, causando il fallimento del caricamento.)

(6)Risultato del Test:
Dopo aver caricato il codice, connetti il robot al modulo Bluetooth e associa l’APP Bluetooth. Accendi l’interruttore di alimentazione dello shield per motori. Posiziona il robot sul pavimento, puoi usare questi pulsanti dell’app Bluetooth per controllare il robot.
Le frecce su, giù, sinistra e destra controllano rispettivamente il robot per muoversi in avanti, indietro, a sinistra e a destra.

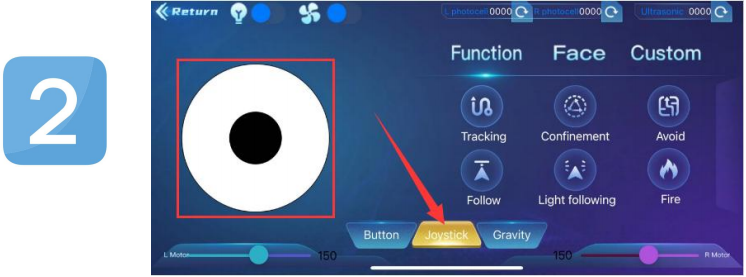
Clicca il pulsante joystick e trascina la direzione del punto nero nel cerchio bianco per controllare la direzione di movimento del robot.
Clicca il pulsante Gravità e inclina il telefono nelle direzioni avanti, indietro, sinistra e destra, e il robot si muoverà nella direzione in cui il telefono è inclinato.
