プロジェクト 17:Line Tracking Sensor
プロジェクト 17.1:Detect Line Tracking Sensor
1. 説明
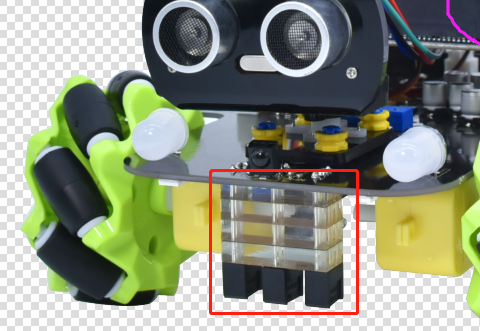
Keyestudio 4WD Mecanum Robot Car のモータードライバーボードには、TCRT5000 IRモジュールと3つのポテンショメータを採用した3チャンネルのライン追跡センサーが搭載されています。
TCRT5000 IRモジュールは赤外線発光素子と赤外線受光素子を内蔵しています。発光素子から出された赤外線が反射して受光素子に到達すると、受光素子の抵抗が変化し、それが回路上の電圧変化として一般に現れます。
受光素子が受ける赤外線の強度に応じて抵抗が変化し、これは反射面の色や反射面と受光素子間の距離に依存します。検出時には黒が高レベル(High)でアクティブ、白が低レベル(Low)でアクティブとなります。
2. 動作原理
車が白い路面の上を走ると、車体下部に取り付けられたIR発光素子が路面を検出するために赤外線を発し、受光素子が反射光を受け取ります。すると出力端は低レベル(0)を出力し、黒いラインを検出すると高レベル(1)を出力します。
4WD Mecanum Robot Car の底面に白い紙を置いた後、3wayトラッキングセンサーのポテンショメータを回します。センサーモジュールのインジケータが点灯したら、車を持ち上げて4WD Mecanum Robot Car の左右の車輪が浮くようにします。白紙とセンサーの距離は約1.5cmです。センサーモジュールのインジケータが消灯したら感度の調整が完了です。
3. 準備
micro:bit ボードを keyestudio 4WD Mecanum Robot Car V2.0 のスロットに差し込む
電池を電池ボックスに入れる
電源スイッチを ON にする
USB ケーブルで micro:bit をコンピュータに接続する
Web版 Makecode を開く
4. テストコード

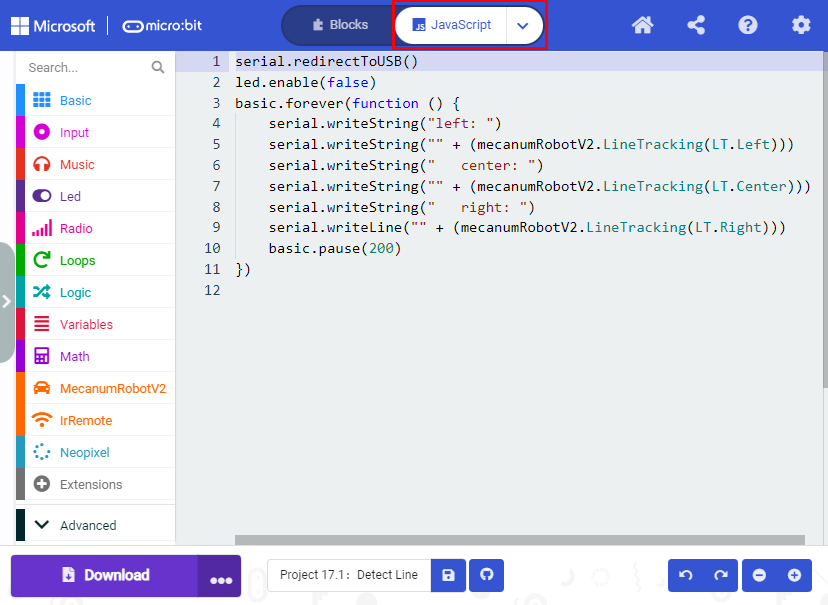
“JavaScript” をクリックして対応する JavaScript コードを表示します:
5. テスト結果
コードを micro:bit にダウンロードし、POWER スイッチを ON にします。
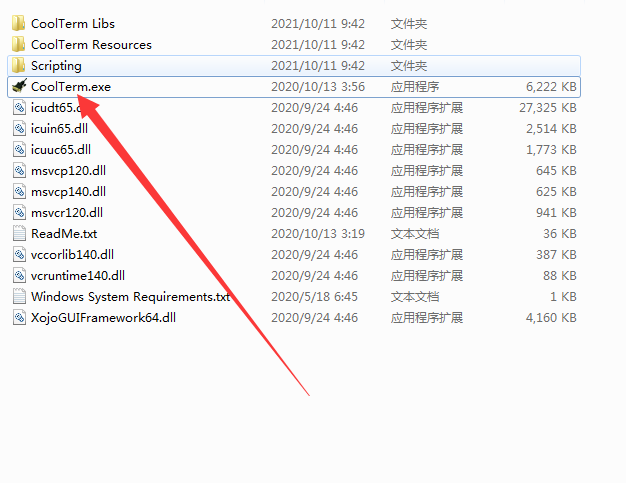
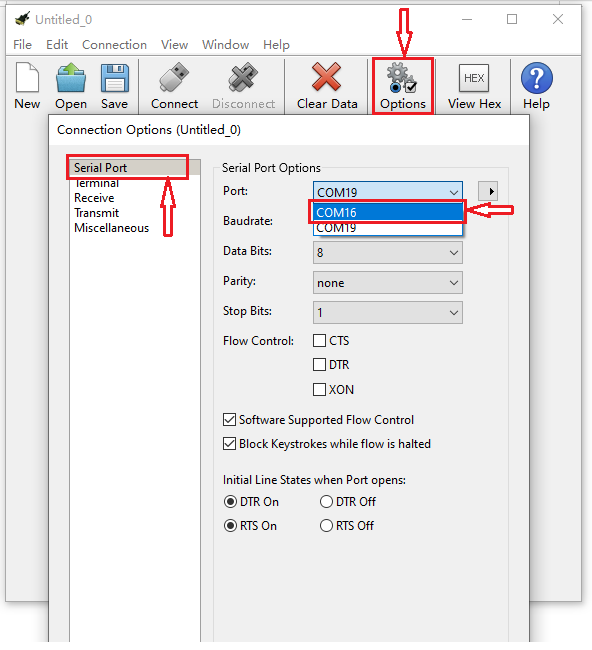
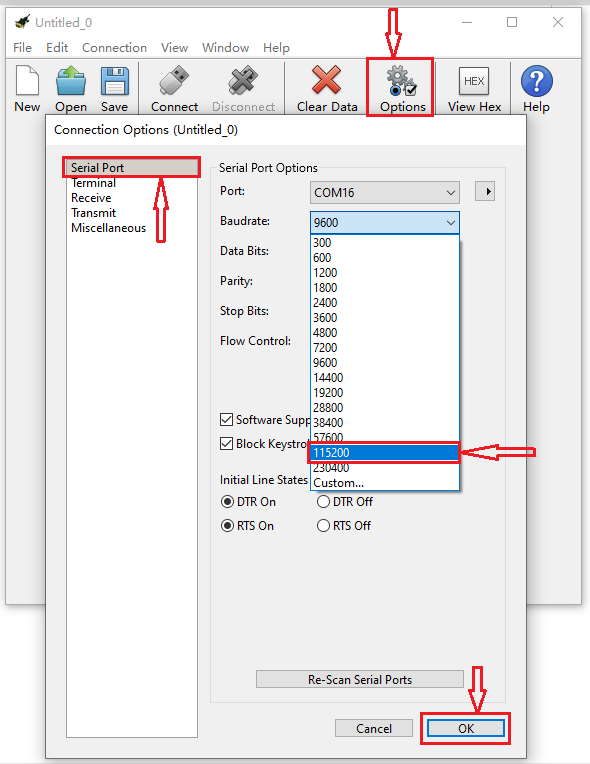
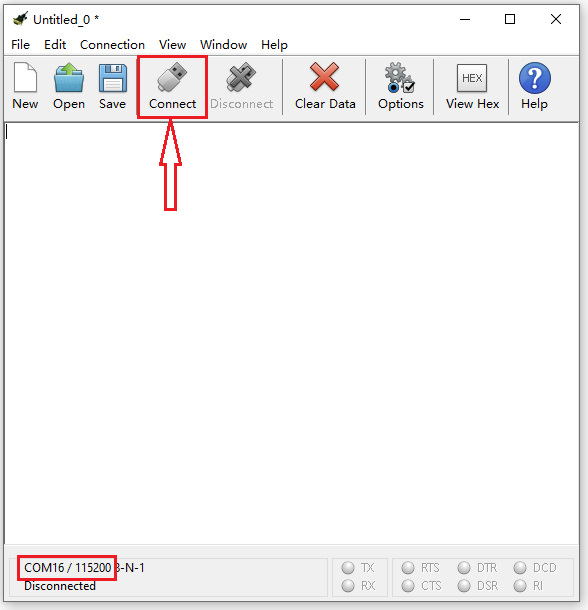
CoolTerm を開き、Options をクリックして SerialPort を選択します。COM ポートとボーレートを 115200 に設定します。“OK” と “Connect” をクリックします。
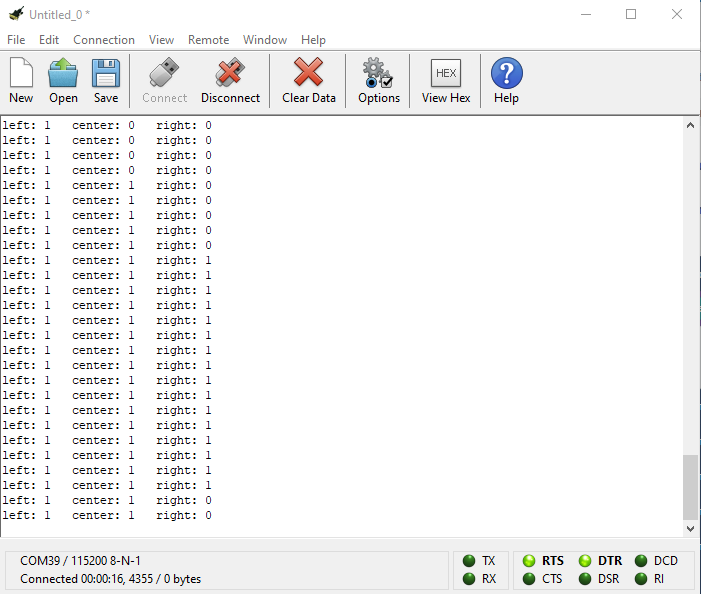
CoolTerm のシリアルモニタには、ライン追跡センサーが読み取ったデジタル信号が表示されます。
プロジェクト 17.2:Tracking Smart Car
1. 説明
このレッスンでは、ライン追跡センサーとモーターを組み合わせてライン追跡スマートカーを作ります。
micro:bit ボードが信号を解析し、スマートカーを制御してライン追跡機能を実現します。
2. 動作原理
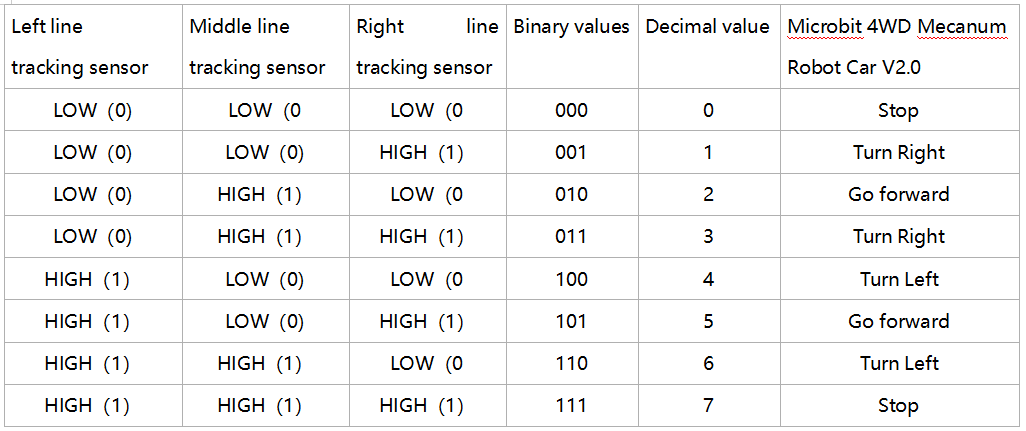
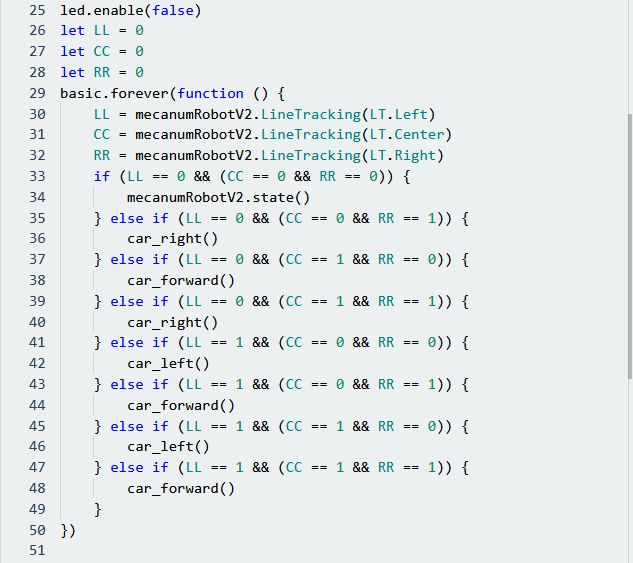
スマートカーは、3チャンネルライン追跡センサーから受け取る値に応じて異なる動作を行います。
3. 準備
micro:bit ボードを keyestudio 4WD Mecanum Robot Car V2.0 のスロットに差し込む
電池を電池ボックスに入れる
電源スイッチを ON にする
USB ケーブルで micro:bit をコンピュータに接続する
Web版 Makecode を開く
警告: 3way トラッキングセンサーは、直射日光などの赤外線干渉がない環境で使用してください。太陽光には赤外線や紫外線などの不可視光が多く含まれています。強い日光下では 3way トラッキングセンサーは正常に動作しない可能性があります。
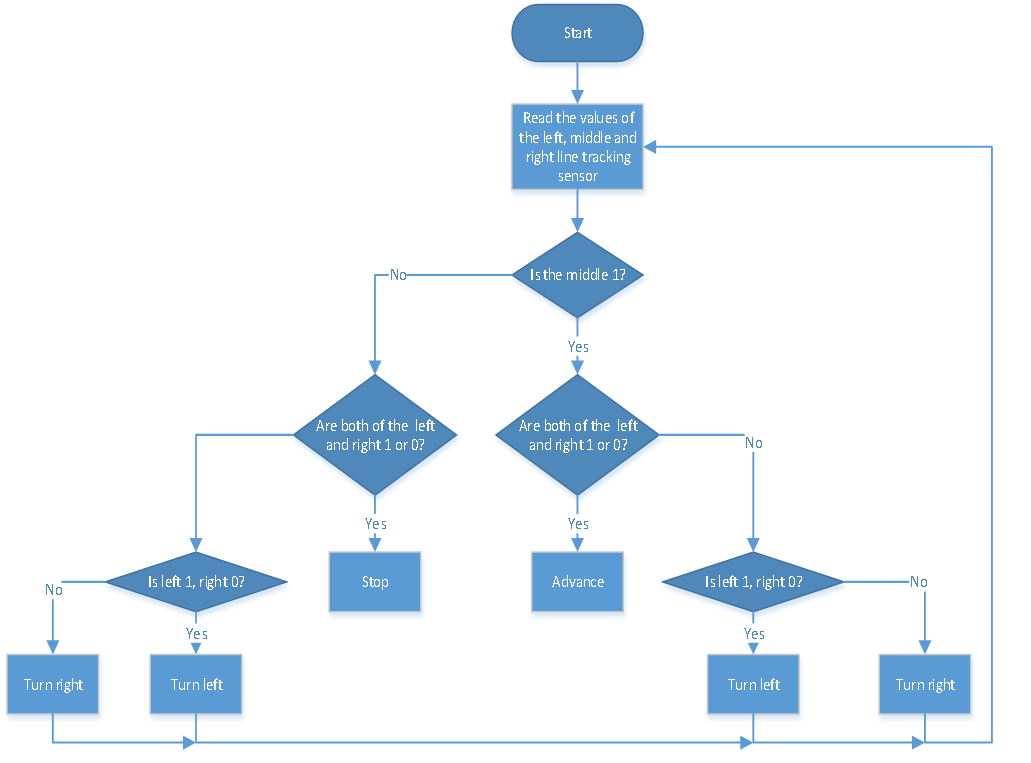
4.フローチャート
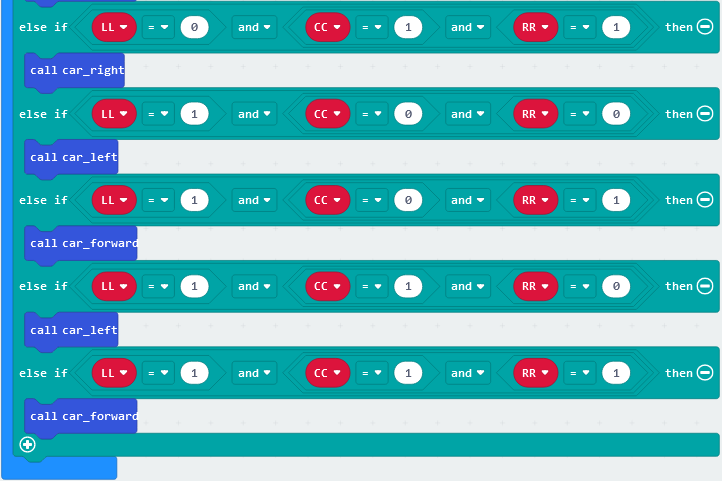
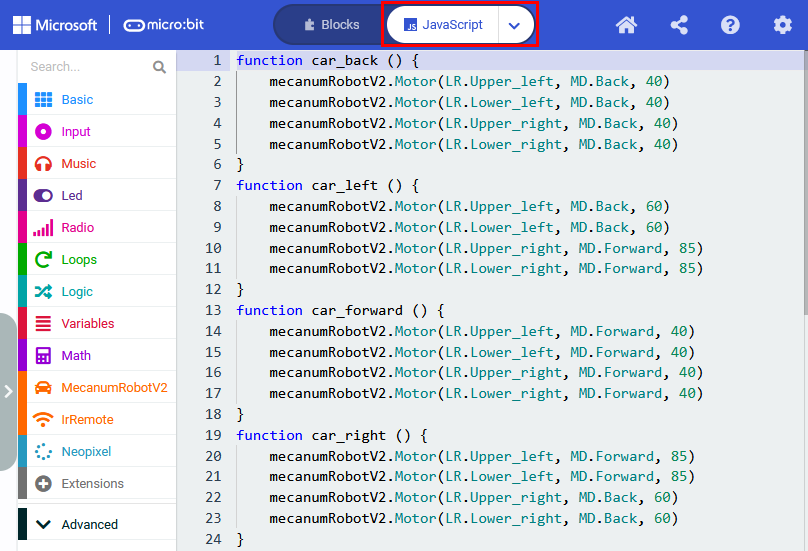
5. テストコード
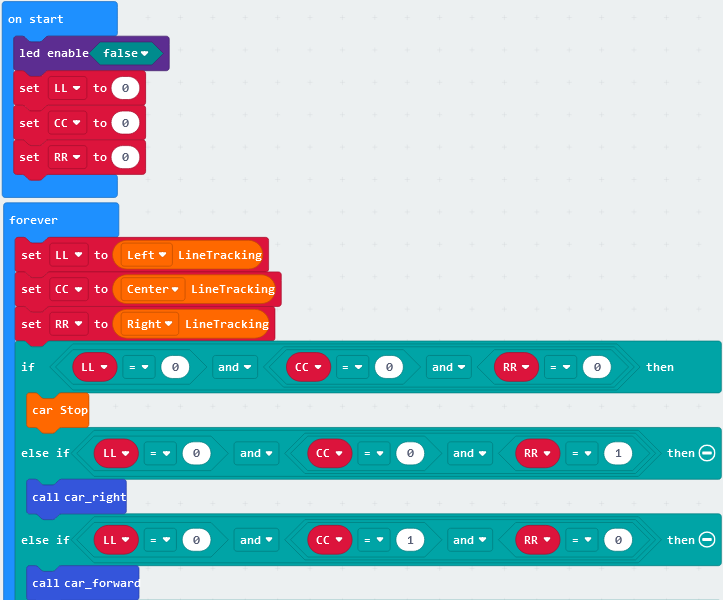
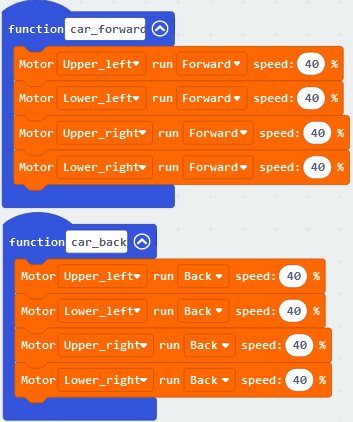
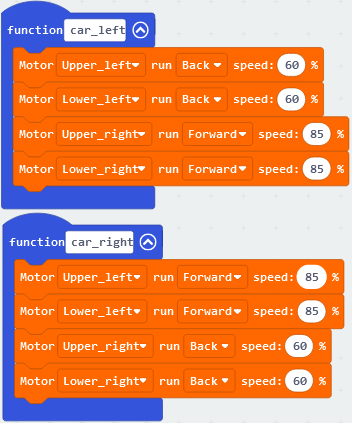
“JavaScript” をクリックして対応する JavaScript コードを表示します:
5. テスト結果
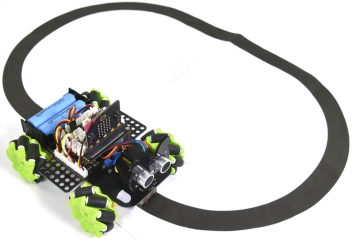
コードを micro:bit にダウンロードし、POWER を ON にすると、ライン追跡カーは黒いラインに沿って前進します。
注意: micro:bit カーの背面にあるスイッチを入れてください。黒いラインの幅はライン追跡センサーの幅より広くしてください。
強い光の下でスマートカーをテストするのは避けてください。