プロジェクト 19:IR リモコン
プロジェクト 19.1:IR リモコンのデコード
1. 説明
赤外線リモコンは日常生活で広く使われていることは疑いありません。テレビ、ステレオ、ビデオレコーダー、衛星受信機など、さまざまな家電の制御に使用されます。赤外線リモコンは、赤外線送信システムと赤外線受信システムで構成されます。つまり、赤外線リモコン本体、赤外線受信モジュール、およびデコード可能なマイコン(単一チップマイコン)です。

リモコンから出る38Kの赤外線キャリア信号は、リモコン内のエンコードチップによって符号化されています。パイロットコード、ユーザーコード、ユーザー反転コード、データコード、データ反転コードのセクションで構成されています。パルスの時間間隔によって0か1の信号かを区別し、これらの0、1信号で符号化されます。
同じリモコンのユーザーコードは変わりません。データコードでキーを識別できます。
リモコンのボタンが押されると、リモコンは赤外線キャリア信号を送信します。IR受信機が信号を受信すると、プログラムはキャリア信号をデコードしてどのキーが押されたかを判定します。MCUは受信した01信号をデコードし、どのリモコンのキーが押されたかを判断します。
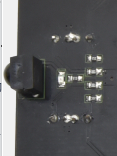
使用する赤外線受信機は赤外線受信モジュールです。主に赤外線受信ヘッドで構成され、受信・増幅・復調を統合したデバイスです。内部ICが復調を完了しており、赤外線の受信から出力までを実現し、TTL信号と互換性があります。さらに、赤外線リモコンや赤外線データ伝送に適しています。受信機が製造した赤外線受信モジュールは信号線、VCC、GNDの3ピンのみです。
上の画像に従い、赤外線受信機の統合ポートはモータードライバ基板のP9 5V Gポートに接続され、micro:bitのP9によって制御されます。
2. パラメータ:
動作電圧: 3.3-5V(DC)
インターフェース: 3PIN
出力信号: デジタル信号
受信角度: 90度
周波数: 38khz
受信距離: 約5m
3. 準備
micro:bitボードを keyestudio 4WD Mecanum Robot Car V2.0 のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをONに切り替える
USBケーブルでmicro:bitをパソコンに接続する
MakecodeのWebバージョンを開く
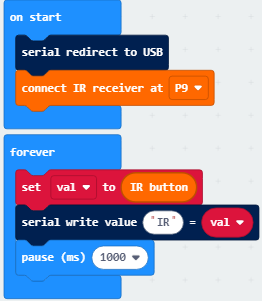
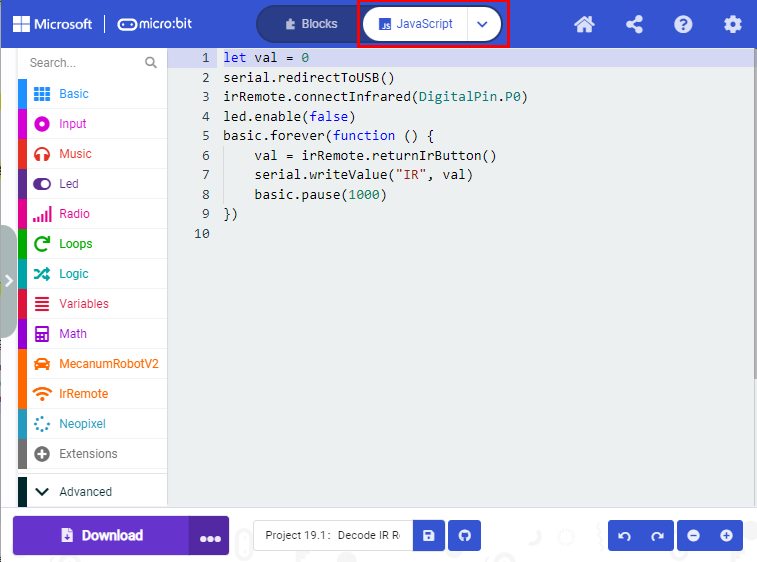
4. テストコード
「JavaScript」をクリックして対応するJavaScriptコードに切り替えます:
コードの説明: ボタンが押されていないときはシリアルモニタに常に0が表示され、押すと対応するキー値が表示されます。
注意:
このキットに含まれるリモコンには電池が付属していません。オンラインでの購入を推奨します。(電池の種類:CR2025)。
テスト前にIRリモコンが正常か確認してください。確認のための方法を紹介します。
携帯のカメラを起動し、IRリモコンをカメラに向けてボタンを押します。カメラに紫色の点滅が見えればリモコンは正常です。
5. テスト結果
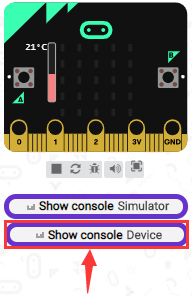
コードをmicro:bitボードにダウンロードし、USBケーブルを抜かないでください。クリック!./media/Makecode_e0580d78.png
{kind=link}
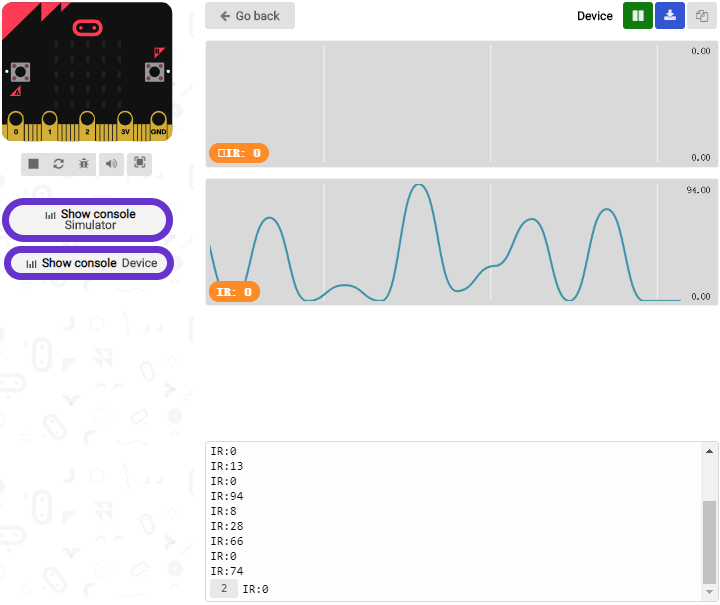
IRリモコンをIR受信機に向けてボタンを押すと、シリアルモニタに対応するキー値が表示されます。以下のとおりです:
CoolTermを開き、OptionsをクリックしてSerialPortを選択します。COMポートとボーレート115200を設定します。「OK」と「Connect」をクリックします。
CoolTermのシリアルモニタは以下のようにキー値を表示します:
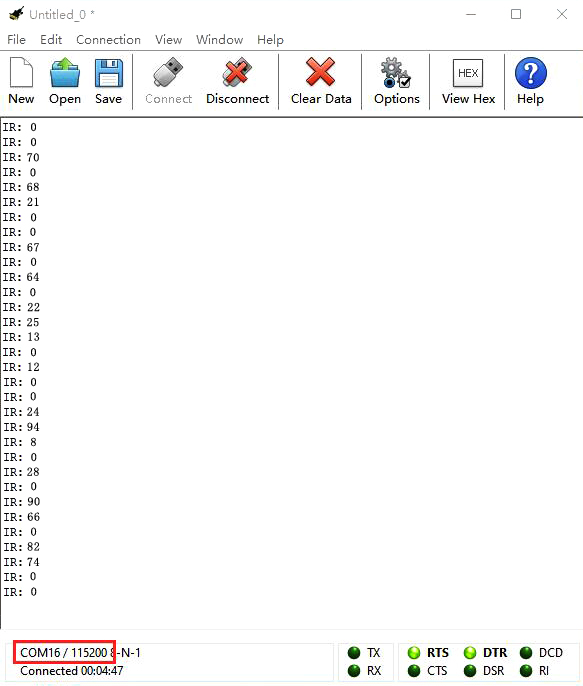
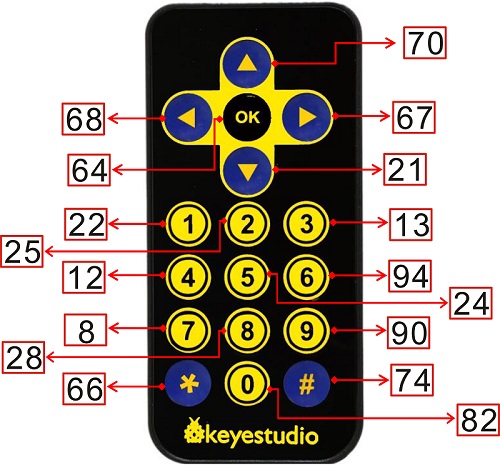
キー値は参照のために次のように表示されます:
プロジェクト 19.2:IR リモコン

1. 説明
このプロジェクトでは、IRリモコンとカーシールドを組み合わせてIRリモコン式スマートカーを作成します。原理は、IRリモコンからカーシールドのIR受信モジュールにキー信号を送信し、車の動作を制御することです。
2. 準備
micro:bitボードを keyestudio 4WD Mecanum Robot Car V2.0 のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをONに切り替える
USBケーブルでmicro:bitをパソコンに接続する
MakecodeのWebバージョンを開く
注意: 赤外線センサーと赤外線リモコンは、太陽光のような赤外線ノイズが多い環境では使用しないでください。太陽光には赤外線や紫外線など多くの不可視光が含まれており、強い日光下では正常に動作しないことがあります。
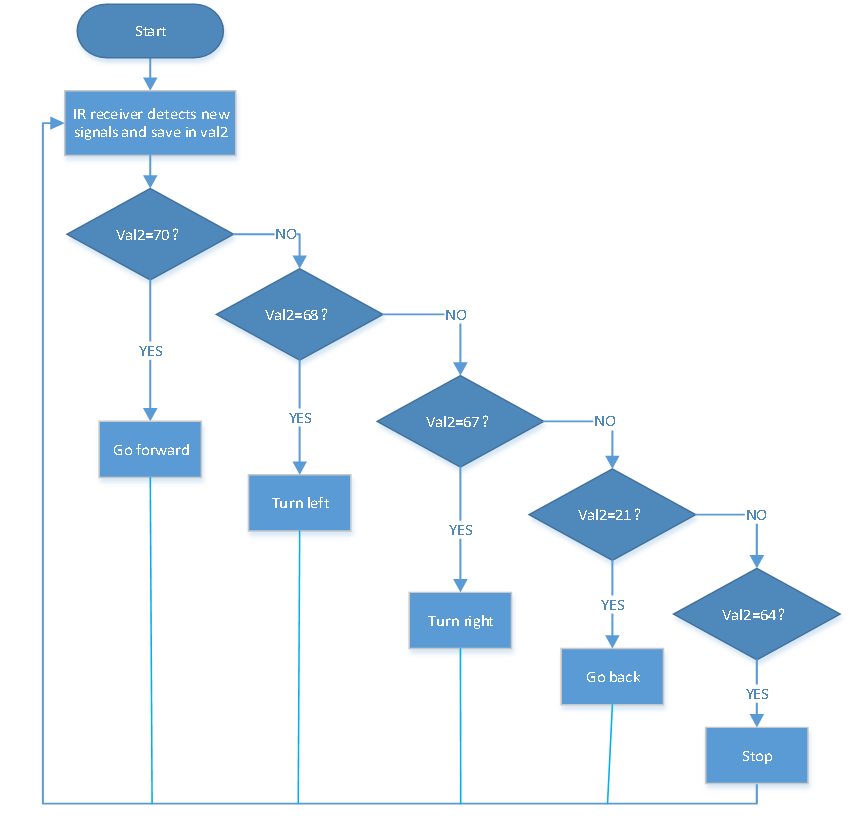
3. フローチャート
4. テストコード
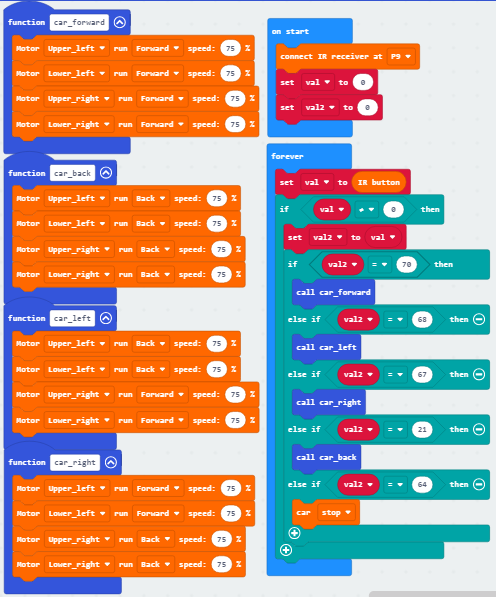
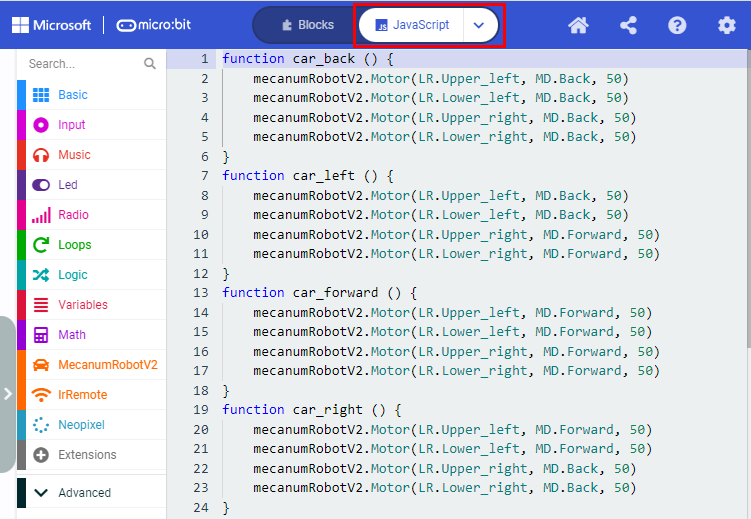
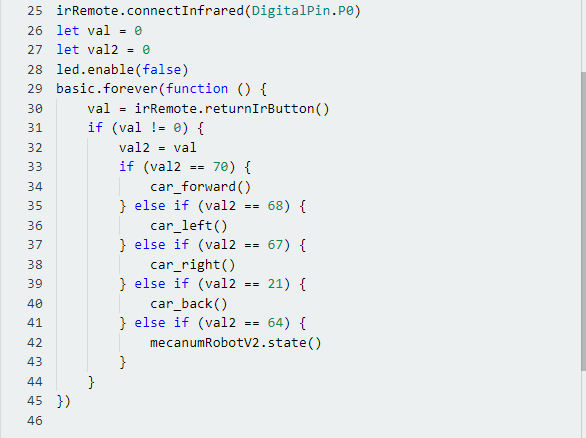
「JavaScript」をクリックして対応するJavaScriptコードに切り替えます:
5. テスト結果
コードをmicro:bitボードにダウンロードし、POWERをONにします。
IRリモコンをmicro:bitに向けてボタンを押して、スマートカーを操作します。
 ボタンでスマートカーが前進、
ボタンでスマートカーが前進、 は左折、
は左折、 は右折、
は右折、 は後退、
は後退、 は停止を示します。
は停止を示します。
注意: テスト時、IRリモコンとスマートカーのIR受信ヘッドとの距離は5m未満にしてください。