プロジェクト 18:超音波センサー
プロジェクト 18.1:超音波測距
1. 説明
超音波センサーはコウモリのようにソナーを利用して物体までの距離を測定します。高精度かつ安定した読み取りが可能な、使いやすい非接触距離検出を提供します。超音波の送信モジュールと受信モジュールが含まれています。
超音波センサーは障害物検知や距離測定のアプリケーションをはじめ、さまざまな電子プロジェクトで広く使用されています。
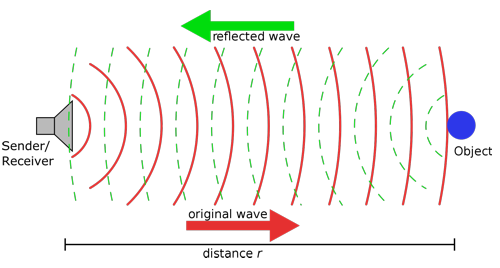
超音波モジュールはトリガー信号の後に超音波を発信します。超音波が物体に当たり反射して戻ってくると、モジュールはエコー信号を出力するため、トリガー信号(TRIG)とエコー信号(ECHO)の時間差から物体までの距離を算出できます。
図のように、左右に並んだ2つの目のような形をしています。片方が送信側、もう片方が受信側です。
上の配線図によれば、超音波センサーモジュールの統合ポートは、micro:bit用モータードライバ基板の5V G P15 P16ポートに接続されています。Trig(T)ピンはmicro:bitのP15で制御され、Echo(E)ピンはP16に接続されています。

2. 動作原理
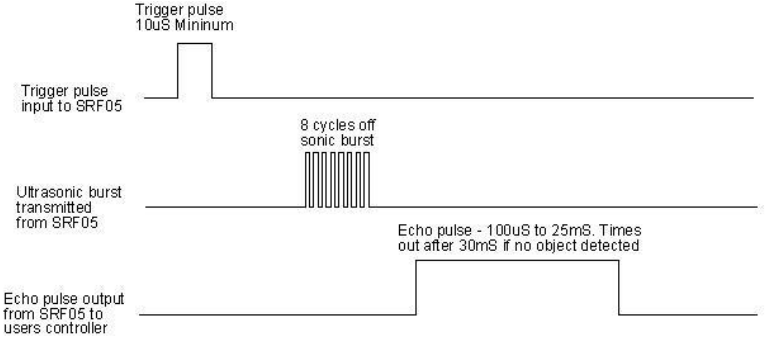
(1) TRIGをLOWに引き、最低10µsのHIGHパルスを発生させる;
(2) トリガー後、モジュールは自動的に8回の40kHz超音波パルスを送信し、信号の返り(エコー)があるかを検出する;
(3) もし信号の返りがあれば、ECHO(E)がHIGHを出力します。そのHIGHの持続時間が超音波の送信から受信までの時間です。テスト距離 = HIGHの持続時間 *340m/s*0.5。
3. 仕様
動作電圧: 3-5.5V (DC)
動作電流: 15mA
動作周波数: 40 kHz
最大検出距離: 約3m
最小検出距離: 2-3cm
精度: 最大0.2cm
検出角度: 15度未満
入力トリガーパルス: 10µs TTLレベル
出力エコー信号: TTLレベル信号(HIGH)を出力し、距離に比例
4. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ボックスに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピューターに接続する
Web版のMakecodeを開く
5. テストコード
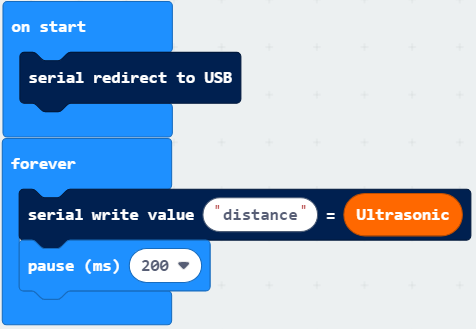
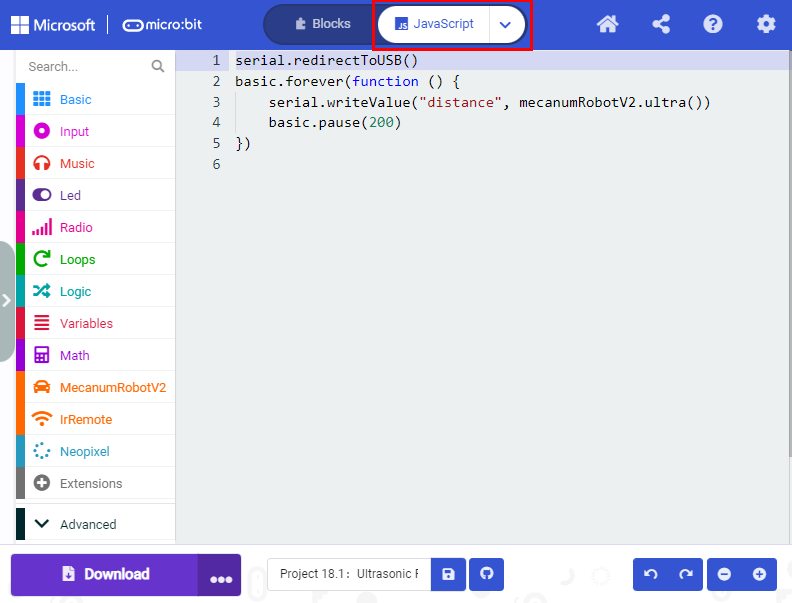
“JavaScript”をクリックして対応するJavaScriptコードを表示します:
6. テスト結果
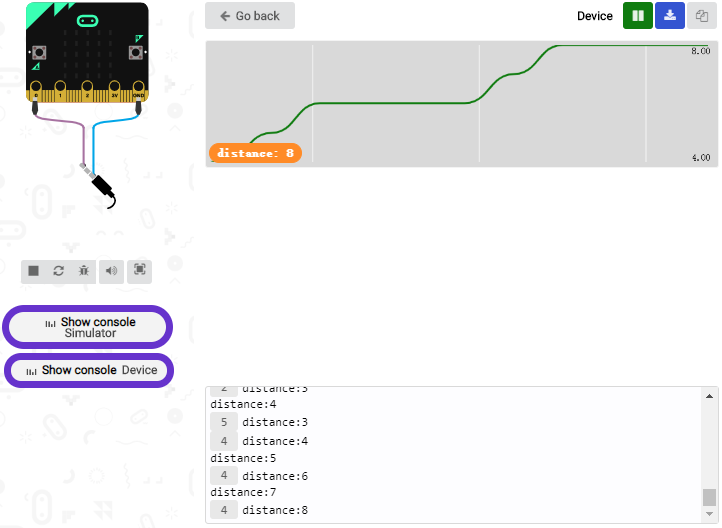
コードをmicro:bitにダウンロードし、USBケーブルを接続したままPOWERスイッチをONにします。距離の値がモニタに表示されます。

モニタには、障害物と超音波センサー間の距離が表示されます(下図参照)。
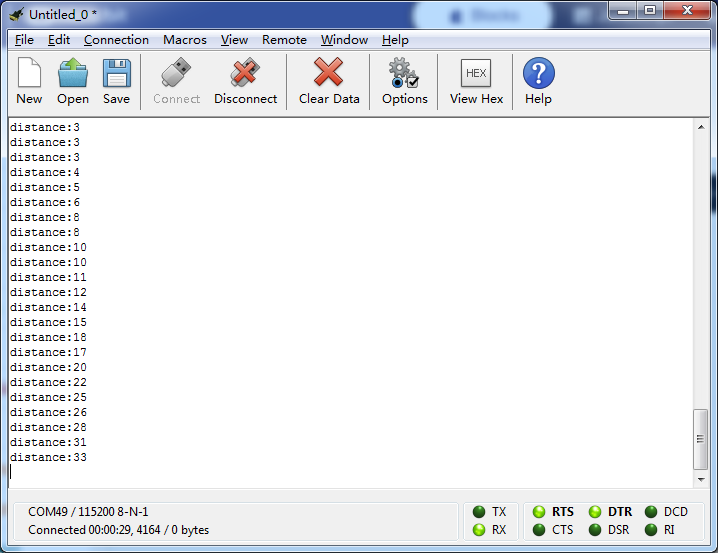
CoolTermを開き、OptionsをクリックしてSerialPortを選択します。COMポートとボーレートを115200に設定します(テストによりMicro:bitのUSBシリアル通信のボーレートは115200です)。“OK”と“Connect”をクリックします。
CoolTermのシリアルモニタは以下のように距離値を表示します:
プロジェクト 18.2:超音波による回避
1. 説明
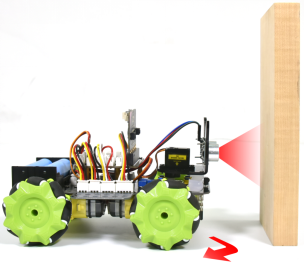
このプロジェクトでは、超音波センサーと車両を組み合わせて超音波回避車を作ります。
その原理は、超音波センサーで車と障害物の距離を検出し、スマートカーの動作を制御することです。
2. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ボックスに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピューターに接続する
Web版のMakecodeを開く
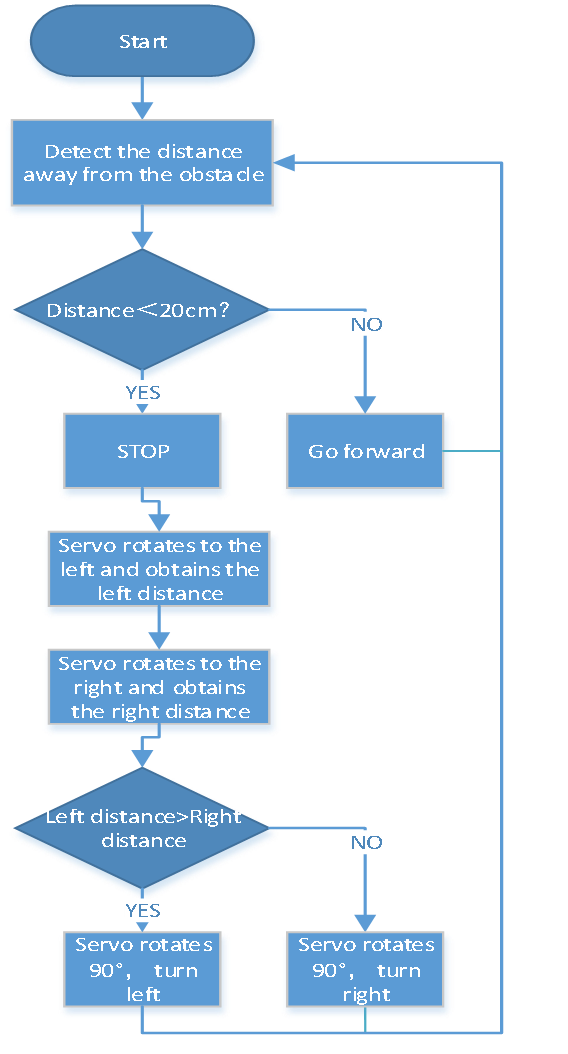
3. フローチャート
4. テストコード
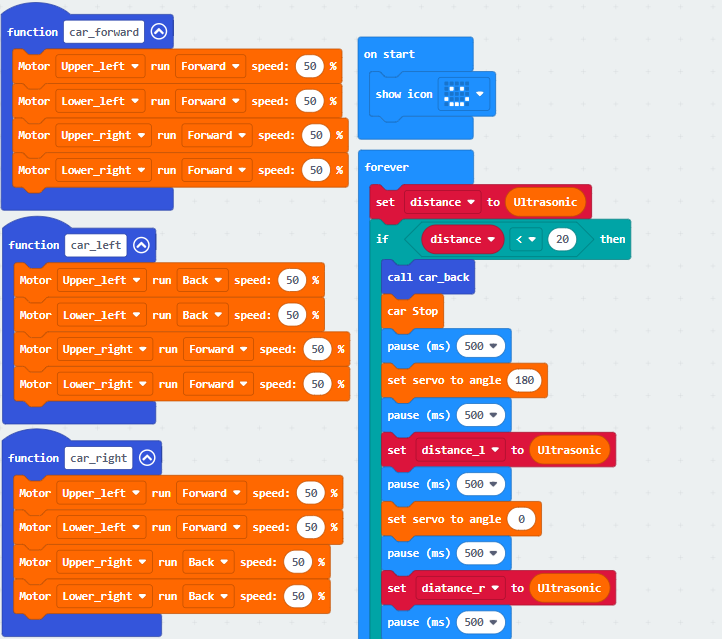
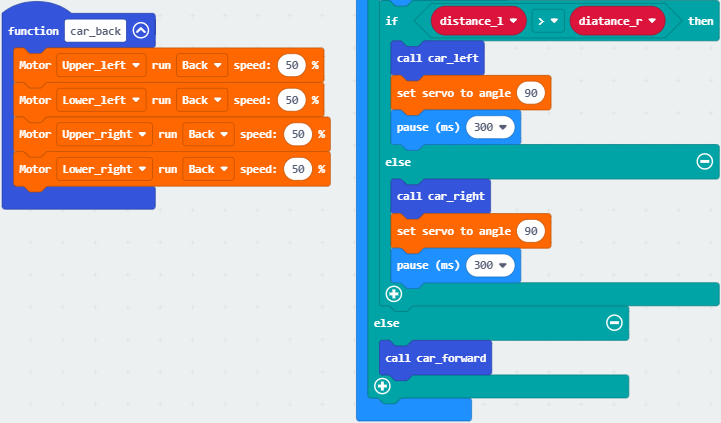
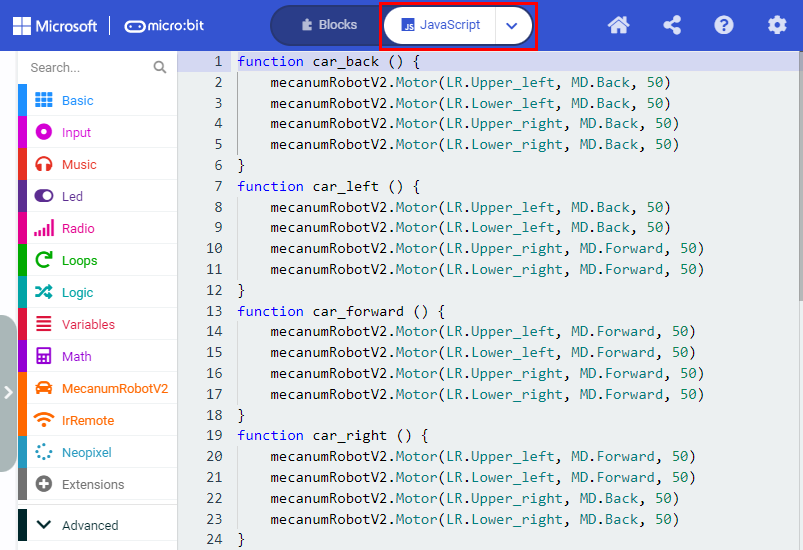
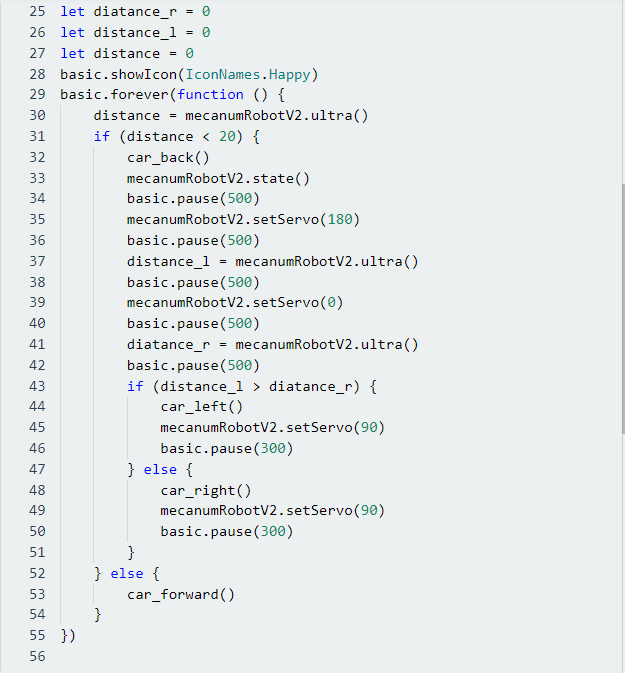
“JavaScript”をクリックして対応するJavaScriptコードを表示します:
5. テスト結果
コードをmicro:bitにダウンロードし、本体とPOWERをONにします。障害物との距離が20cmより大きい場合は車が前進します;逆に、スマートカーは左に曲がります。
プロジェクト 18.3:超音波追従
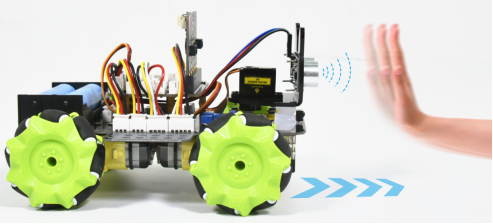
1. 説明
前回のレッスンでは、ライントラッキングセンサーの基本原理を学びました。次に、超音波センサーを車両と組み合わせて超音波追従車を作成します。
超音波センサーは障害物との距離を検出し、車の動作状態を制御します。
2. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ボックスに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピューターに接続する
Web版のMakecodeを開く
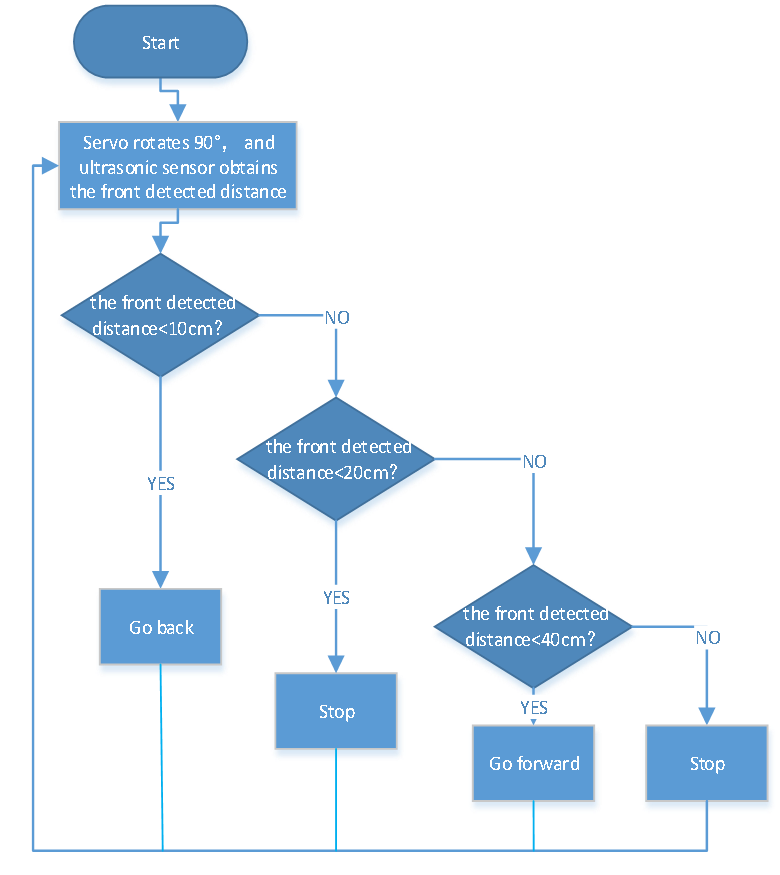
3. フローチャート
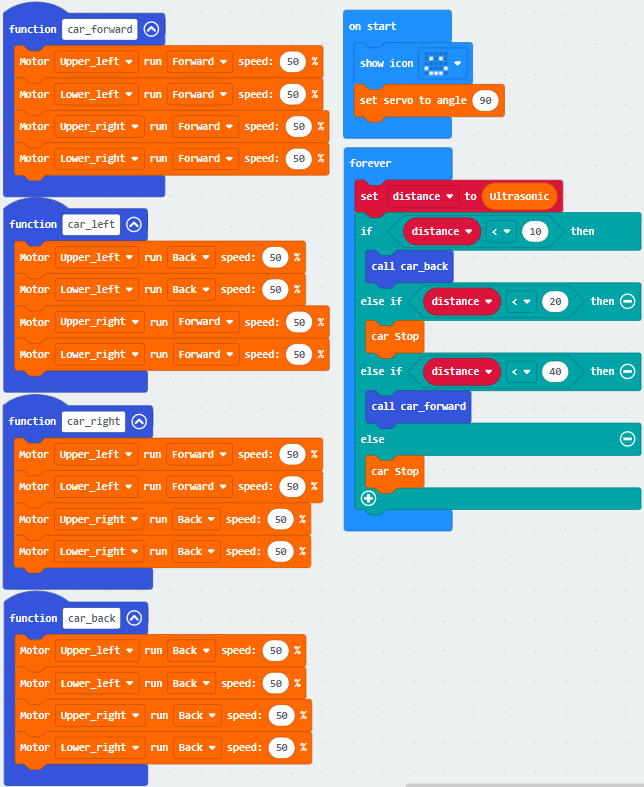
4. テストコード
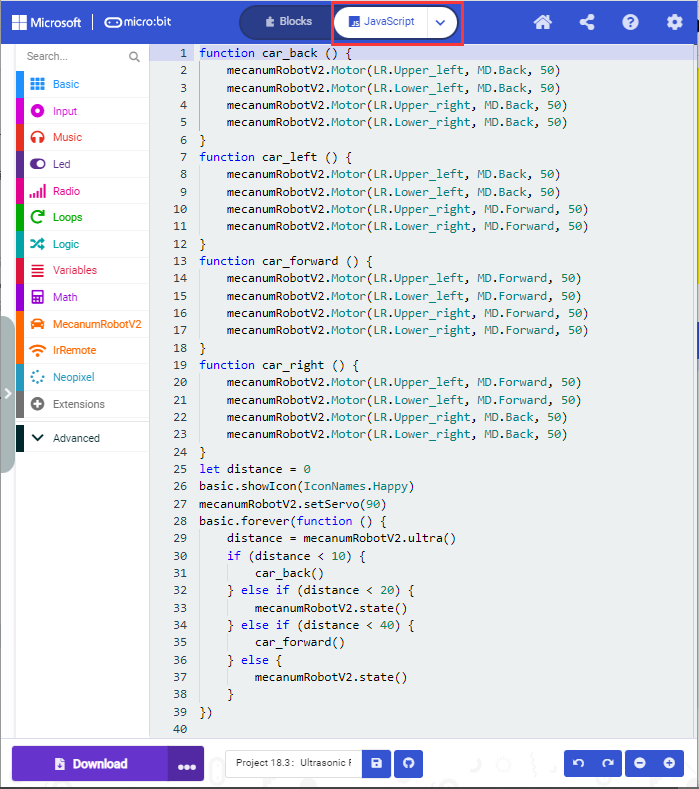
“JavaScript”をクリックして対応するJavaScriptコードを表示します:
5. テスト結果
コードをmicro:bitにダウンロードし、シールド上のPOWERスイッチをONにすると、スマートカーは障害物を追従して移動できるようになります。