プロジェクト 16:Motor
1. 説明
Keyestudio 4WD Mecanum Robot Car は、一般的なDCモータをベースに開発された4つのDC減速モータ(ギア減速モータとも呼ばれる)を搭載しています。適合するギヤ減速箱を備えており、回転数は低くなりますがトルクは大きくなります。さらに、減速箱の減速比を変えることで、異なる速度とトルクを得ることができます。
ギアモータはギヤモータとモータの統合であり、鉄鋼・機械産業で広く応用されています。
micro:bit用モータドライバシールドにはDRV8833チップが搭載されています。IOポート資源を節約するために、DRV8833チップで4つのDCギアモータの回転方向と速度を制御します。
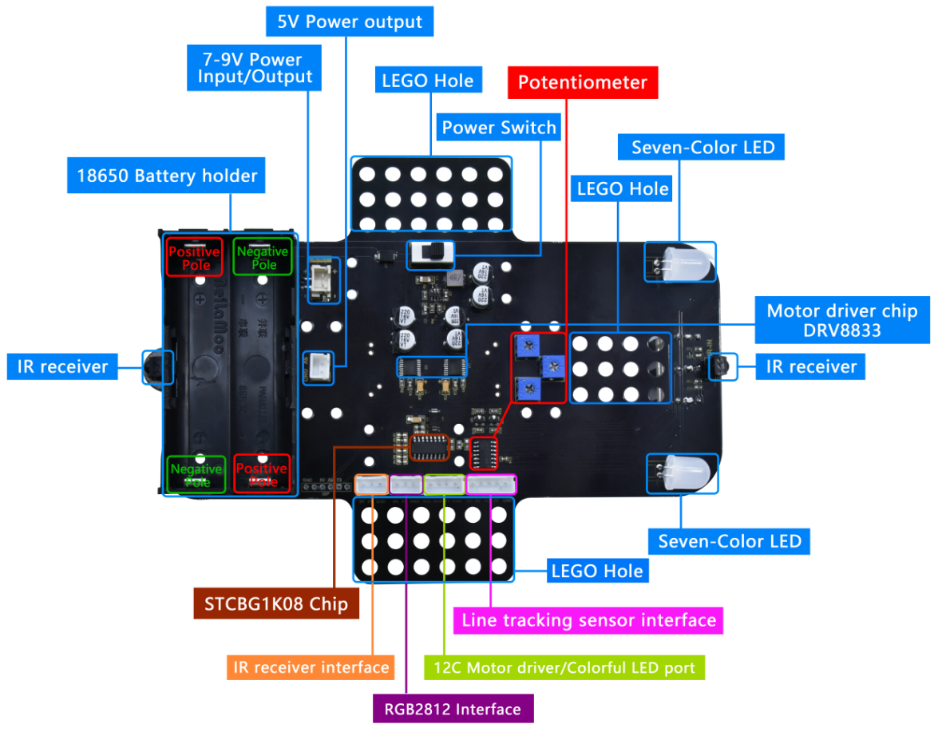
Front
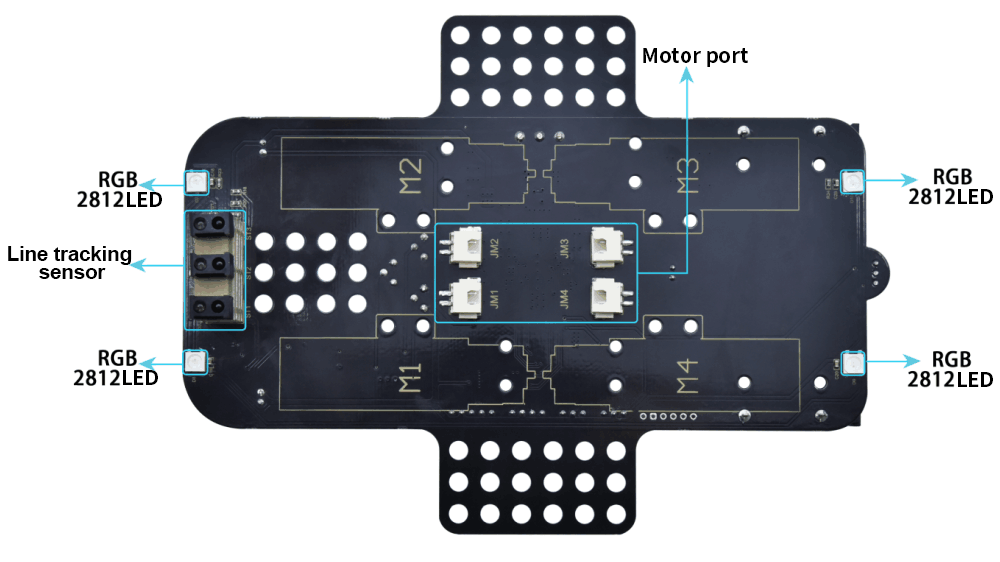
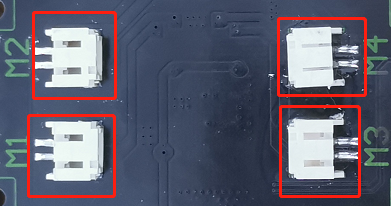
Back
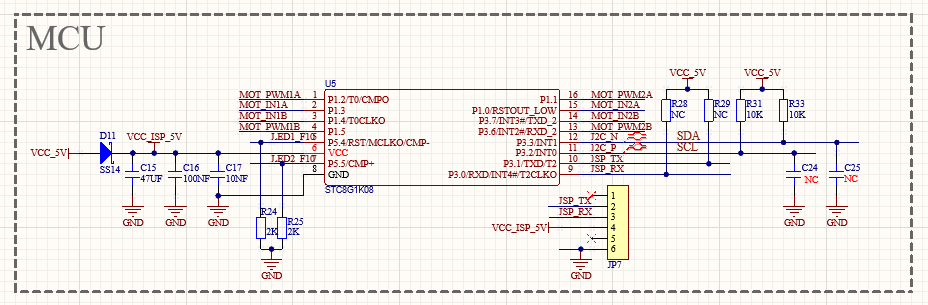
STC8G1K08 Chip circuit
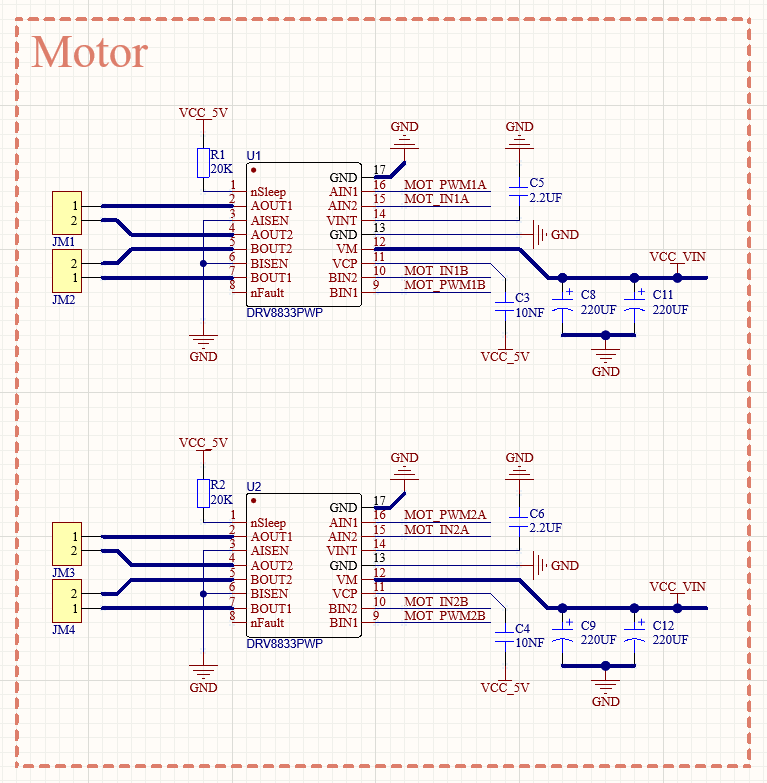
HR8833 Motor driver circuit
2. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをON側に合わせる
USBケーブルでmicro:bitをコンピュータに接続する
MakecodeのWeb版を開く
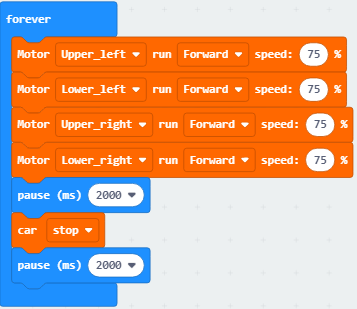
3. Test Code1
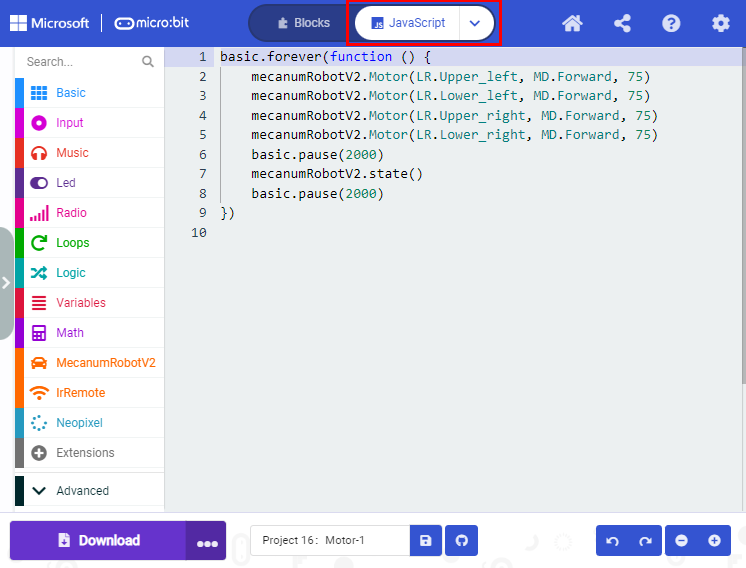
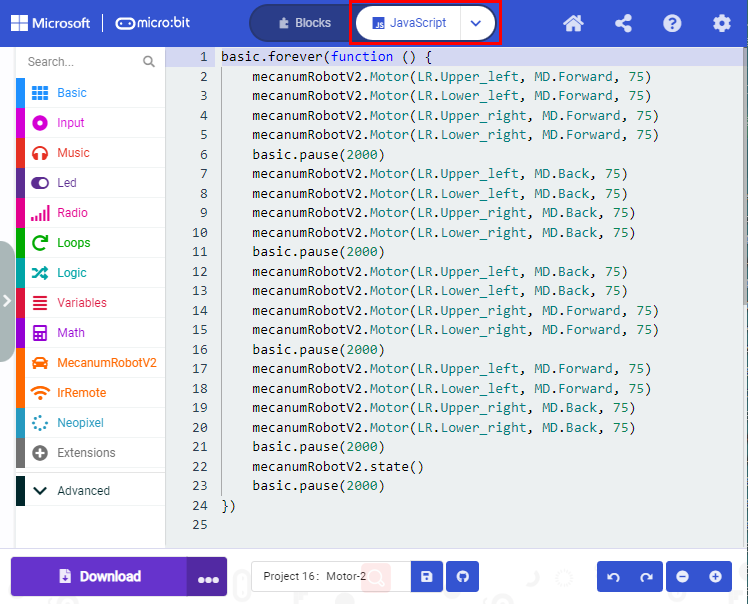
「Click“JavaScript" to view the corresponding JavaScript code:」の表示部分(UIのラベル)については、JavaScript の表記はそのままです。対応するJavaScriptコードを表示するには“JavaScript"をクリックしてください。
4. テスト結果1
コード1をmicro:bitボードにダウンロードし、POWERスイッチをONにします。スマートカーは2秒前進し、2秒停止します。
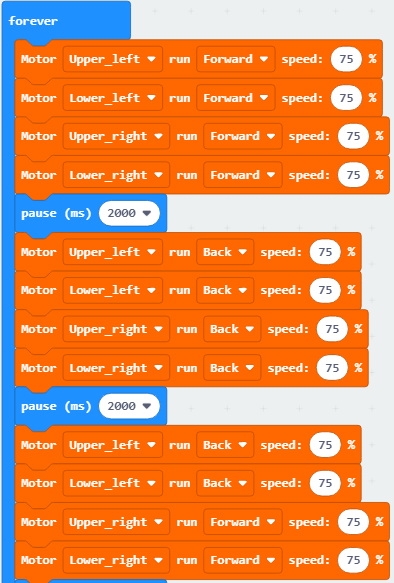
5. Test Code2
「Click“JavaScript" to view the corresponding JavaScript code:」の表示部分については、JavaScript の表記はそのままです。対応するJavaScriptコードを表示するには“JavaScript"をクリックしてください。
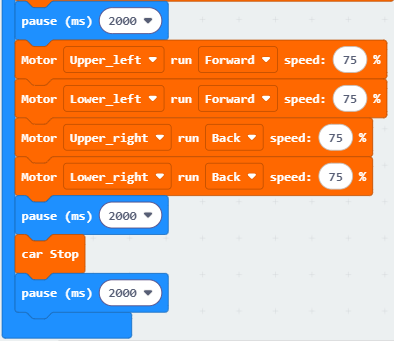
6. テスト結果2
コード2をmicro:bitボードにダウンロードすると、車は2秒前進し、2秒後退し、2秒左折し、2秒右折し、2秒停止し、このパターンを繰り返します。