Project 4 Controllo Servo
1.Descrizione

Il servo motor è un attuatore rotativo a controllo di posizione. È composto principalmente da un alloggiamento, una scheda circuito, un motore core-less, un ingranaggio e un sensore di posizione. Il suo principio di funzionamento è che il servo riceve il segnale inviato da MCU o ricevitori e produce un segnale di riferimento con un periodo di 20ms e una larghezza di 1,5ms, quindi confronta la tensione di polarizzazione continua acquisita con la tensione del potenziometro e ottiene l’uscita della differenza di tensione.
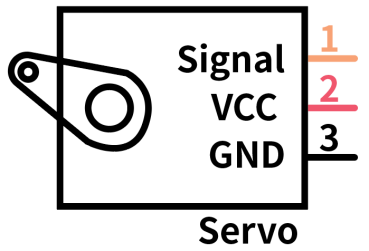
In generale, il servo ha tre fili di colore marrone, rosso e arancione. Il filo marrone è collegato a terra, quello rosso è il polo positivo e quello arancione è il filo del segnale.
L’angolo di rotazione del servo motor è controllato regolando il duty cycle del segnale PWM (Pulse-Width Modulation). Il ciclo standard del segnale PWM è di 20ms (50Hz). Teoricamente, la larghezza è distribuita tra 1ms e 2ms, ma in realtà è tra 0,5ms e 2,5ms. La larghezza corrisponde all’angolo di rotazione da 0° a 180°. Ma si noti che per motori di marche diverse, lo stesso segnale può avere angoli di rotazione differenti.
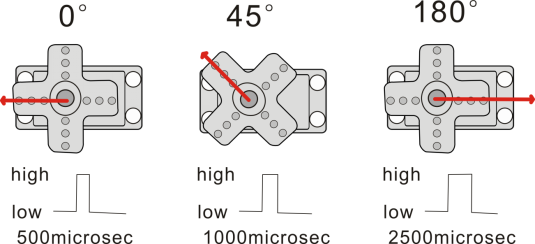
Gli angoli corrispondenti del servo sono mostrati di seguito:

2.Specifiche
Tensione di lavoro: DC 4.8V ~ 6V
Intervallo angolare operativo: circa 180° (a 500 → 2500 μsec)
Intervallo larghezza impulso: 500 → 2500 μsec
Velocità a vuoto: 0.12 ± 0.01 sec / 60 (DC 4.8V) 0.1 ± 0.01 sec / 60 (DC 6V)
Corrente a vuoto: 200 ± 20mA (DC 4.8V) 220 ± 20mA (DC 6V)
Coppia di arresto: 1.3 ± 0.01kg · cm (DC 4.8V) 1.5 ± 0.1kg · cm (DC 6V)
Corrente di arresto: ≦ 850mA (DC 4.8V) ≦ 1000mA (DC 6V)
Corrente in standby: 3 ± 1mA (DC 4.8V) 4 ± 1mA (DC 6V)
3.Componenti
Development Board *1 |
8833 Motor Driver *1 |
Servo*1 |
|---|---|---|
|
|
|
Supporto Batteria 18650*1 |
Cavo USB*1 |
Batteria 18650*2 (fornita dall’utente) |
|
|
|





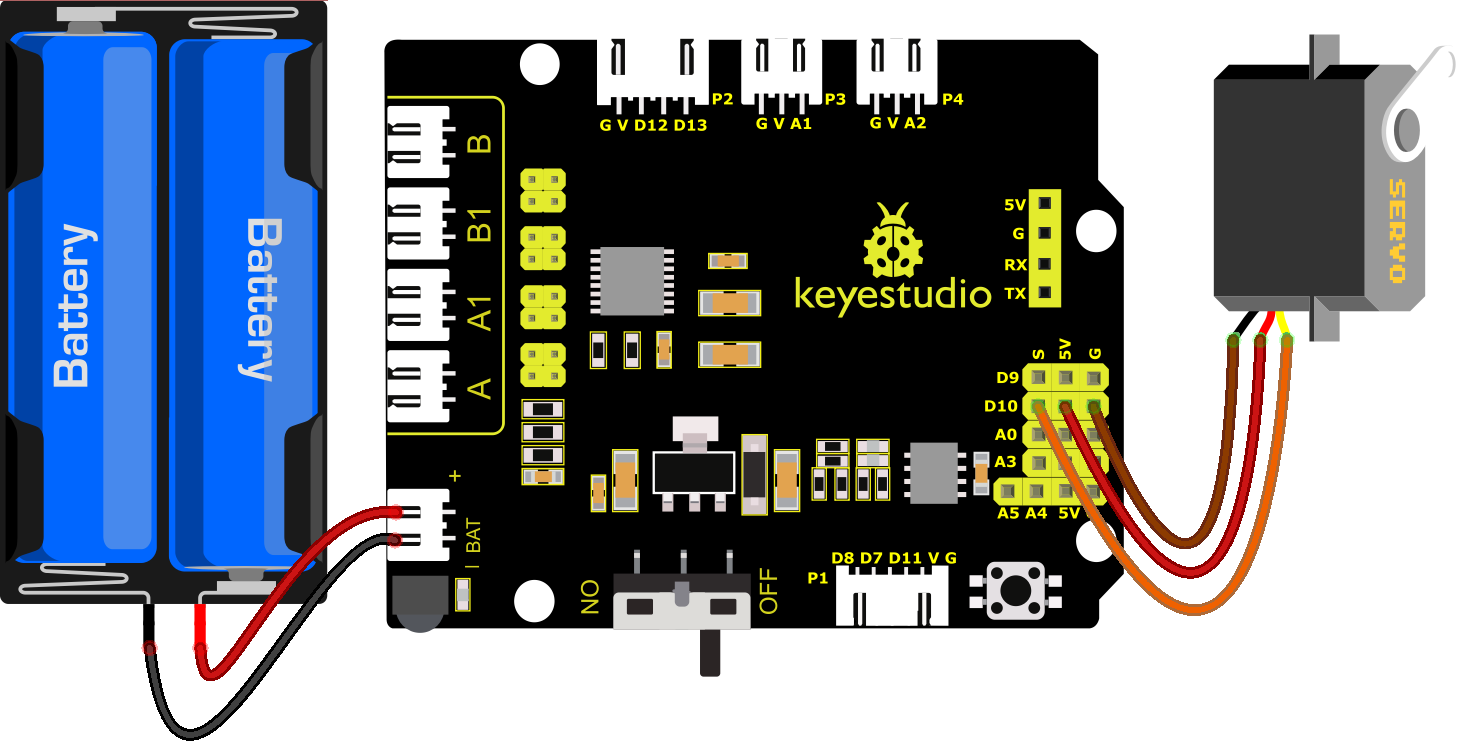
4.Diagramma di Collegamento
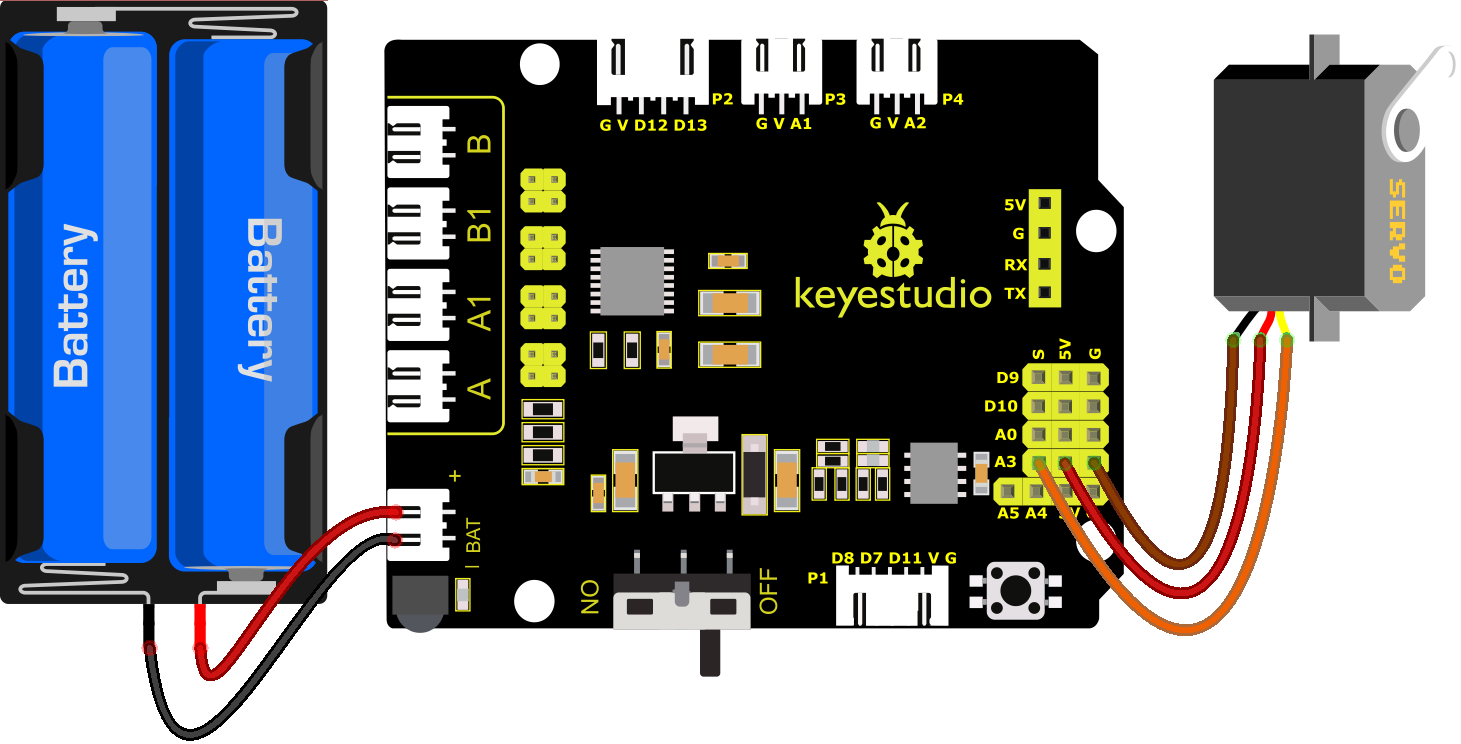
Nota sul cablaggio: Il servo è collegato a G (GND), V (VCC) e A3, il filo marrone del servo è collegato a Gnd (G), quello rosso è collegato a 5V (V) e quello arancione è collegato ad A3.
Il servo deve essere collegato a un’alimentazione esterna a causa dell’elevata richiesta di corrente per pilotare il servo. Generalmente, la corrente della scheda di sviluppo non è sufficiente. Se non si collega l’alimentazione esterna, la scheda di sviluppo potrebbe bruciarsi.
5.Codice di Test
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 4.1
Servo
http://www.keyestudio.com
*/
#define servoPin A3 //Pin del servo
int pos; //variabile angolo del servo
int pulsewidth; //variabile larghezza impulso del servo
void setup() {
pinMode(servoPin, OUTPUT); //imposta il pin del servo come output
procedure(0); //imposta l'angolo del servo a 0 gradi
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // va da 0 gradi a 180 gradi
// a passi di 1 grado
procedure(pos); // indica al servo di andare alla posizione nella variabile 'pos'
delay(15); // controlla la velocità di rotazione del servo
}
for (pos = 180; pos >= 0; pos -= 1) { // va da 180 gradi a 0 gradi
procedure(pos); // indica al servo di andare alla posizione nella variabile 'pos'
delay(15);
}
}
//funzione per controllare il servo
void procedure(int myangle) {
pulsewidth = myangle * 11 + 500; //calcola il valore della larghezza dell'impulso
digitalWrite(servoPin,HIGH);
delayMicroseconds(pulsewidth); //La durata del livello alto è la larghezza dell'impulso
digitalWrite(servoPin,LOW);
delay((20 - pulsewidth / 1000)); //il ciclo è di 20ms, il livello basso dura per il resto del tempo
}
//****************************************************************************
6.Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo lo schema elettrico e alimentare con la fonte esterna. Dopo l’accensione, portare l’interruttore dip su “ON”, quindi il servo oscillerà nell’intervallo da 0° a 180°.
7.Prassi di Estensione
Inoltre, è possibile controllare il servo tramite il file di libreria. Si prega di fare riferimento al link: https://www.arduino.cc/en/Reference/Servo.
//***************************************************************************
/*
keyestudio 4wd BT Car
lesson 4.2
Servo
http://www.keyestudio.com
*/
#include <Servo.h>
Servo myservo; // crea un oggetto servo per controllare un servo
// sulla maggior parte delle schede possono essere creati dodici oggetti servo
int pos = 0; // variabile per memorizzare la posizione del servo
void setup() {
myservo.attach(A3); // collega il servo al pin A3 all'oggetto servo
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // va da 0 gradi a 180 gradi
// a passi di 1 grado
myservo.write(pos); // indica al servo di andare alla posizione nella variabile 'pos'
delay(15); // attende 15ms affinché il servo raggiunga la posizione
}
for (pos = 180; pos >= 0; pos -= 1) { // va da 180 gradi a 0 gradi
myservo.write(pos); // indica al servo di andare alla posizione nella variabile 'pos'
delay(15); // attende 15ms affinché il servo raggiunga la posizione
}
}
//***************************************************************************
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo lo schema elettrico e alimentare con la fonte esterna. Dopo l’accensione, portare l’interruttore dip su “ON”, quindi il servo oscillerà nell’intervallo da 0° a 180° anche in questo caso. Di solito lo controlliamo tramite file di libreria.
8.Spiegazione del Codice
Arduino include #include <Servo.h> (funzione e dichiarazioni per servo)
Di seguito alcune dichiarazioni comuni della funzione servo:
1). attach(interfaccia)——Imposta l’interfaccia del servo
2). write(angolo)——Usato per impostare l’angolo di rotazione del servo, l’intervallo dell’angolo impostato è da 0° a 180°
3). read()——usato per leggere l’angolo del servo, cioè leggere il valore del comando di “write()”
4). attached()——Verifica se il parametro del servo è stato inviato alla sua interfaccia
Nota: Il formato scritto sopra è “nome variabile servo, dichiarazione specifica()”, per esempio: myservo.attach(9).