Progetto 17 Auto Smart Bluetooth Multiuso

1.Descrizione
Nei progetti precedenti, l’auto eseguiva solo una singola funzione. Tuttavia, in questa lezione, integreremo tutte le sue funzioni tramite Bluetooth.
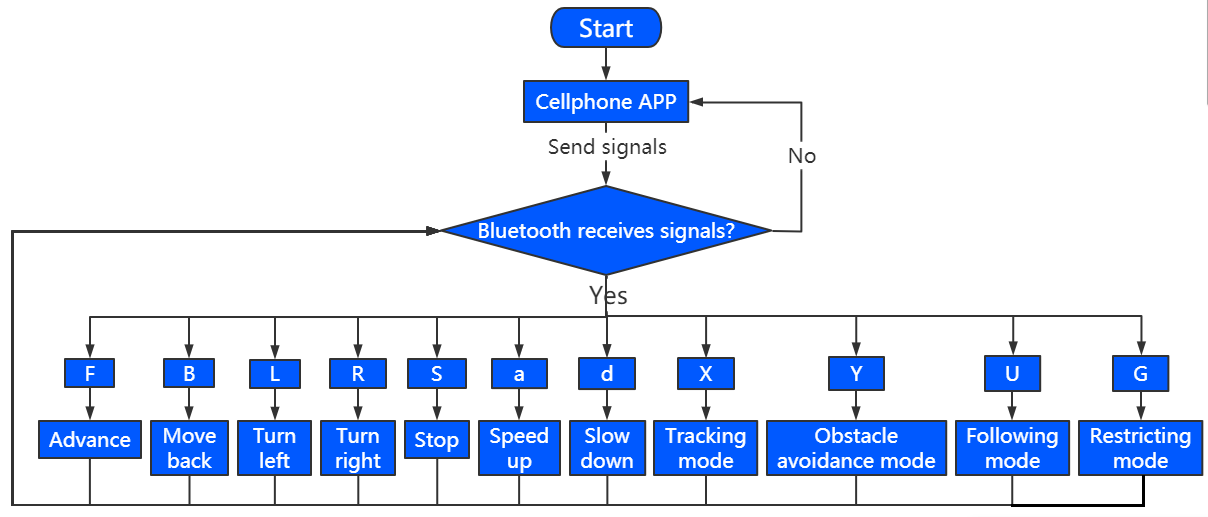
2.Diagramma di Flusso
3.Diagramma di Collegamento
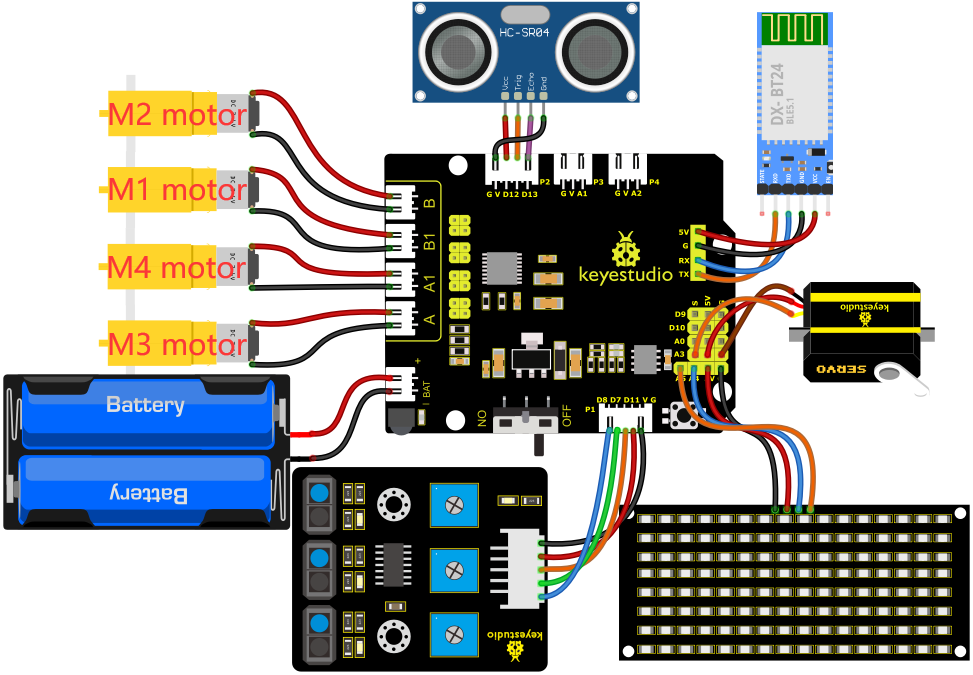
1). GND, VCC, SDA e SCL della scheda LED 8*8 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). RXD, TXD, GND e VCC del modulo Bluetooth sono collegati rispettivamente a TX, RX, G e 5V sullo Shield motore 8833, mentre i pin STATE e BRK del modulo Bluetooth non devono essere collegati.
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso a 5V (V) e il filo arancione a A3.
4). G, V, S1, S2 e S3 del sensore di tracciamento linea sono collegati rispettivamente a G (GND), V (VCC), D11, D7 e D8 della scheda di espansione sensori.
5). VCC, Trig, Echo e Gnd del sensore ad ultrasuoni sono collegati a 5V (V), D12 (S), D13 (S) e Gnd (G).
6). L’alimentazione è collegata alla porta BAT.
4.Codice di Test
Nota: Prima di caricare il codice di test, è necessario rimuovere il modulo Bluetooth, altrimenti il caricamento del codice fallirà. Collegare il modulo Bluetooth dopo aver caricato con successo il codice.
//*******************************************************************************
/*
keyestudio 4wd BT Car
lezione 17
Auto Multifunzionale Bluetooth
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Imposta il pin clock su A5
#define SDA_Pin A4 //Imposta il pin dati su A4
//Array, usato per memorizzare i dati del pattern, può essere calcolato da soli o ottenuto dallo strumento modulo
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char speed_a[] =
{0x00,0x40,0x20,0x10,0x08,0x04,0x02,0xff,0x02,0x04,0x08,0x10,0x20,0x40,0x00,0x00};
unsigned char speed_d[] =
{0x00,0x02,0x04,0x08,0x10,0x20,0x40,0xff,0x40,0x20,0x10,0x08,0x04,0x02,0x00,0x00};
int left_ctrl = 2;//definisce i pin di controllo direzione del motore gruppo B
int left_pwm = 5;//definisce i pin di controllo PWM del motore gruppo B
int right_ctrl = 4;//definisce i pin di controllo direzione del motore gruppo A
int right_pwm = 6;//definisce i pin di controllo PWM del motore gruppo A
int speeds = 150; //Imposta la velocità iniziale a 150
const int servopin = A3;//imposta il pin del servo su A3
int L_pin = 11; //definisce il pin del sensore di tracciamento sinistro come D11
int M_pin = 7; //definisce il pin del sensore di tracciamento centrale come D7
int R_pin = 8; //definisce il pin del sensore di tracciamento destro come D8
int L_val, M_val, R_val;
int trigPin = 12; //Pin TRIG collegato a D12
int echoPin = 13; //Pin ECHO collegato a D13
int distance, distance_l, distance_r;
char BLE_val;
void setup() {
Serial.begin(9600);//Imposta la velocità di trasmissione a 9600
pinMode(left_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo B come OUTPUT
pinMode(left_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo B come OUTPUT
pinMode(right_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo A come OUTPUT
pinMode(right_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo A come OUTPUT
servopulse(servopin,90);//l'angolo del servo è 90 gradi
delay(300);
pinMode(L_pin, INPUT); //I pin del sensore di tracciamento sono configurati in modalità input
pinMode(M_pin, INPUT);
pinMode(R_pin, INPUT);
pinMode(trigPin, OUTPUT); //definisce TRIG come modalità output
pinMode(echoPin, INPUT); //definisce ECHO come modalità input
pinMode(SCL_Pin,OUTPUT);// Imposta il pin clock come output
pinMode(SDA_Pin,OUTPUT);//Imposta il pin dati come output
matrix_display(clear);
matrix_display(start01); //visualizza il pattern di espressione start01
}
void loop() {
if(Serial.available()>0) {
BLE_val = Serial.read();
Serial.println(BLE_val);
}
switch(BLE_val)
{
case 'F' : car_front();
matrix_display(clear);
matrix_display(front);
break;
case 'B' : car_back();
matrix_display(clear);
matrix_display(back);
break;
case 'L' : car_left();
matrix_display(clear);
matrix_display(left);
break;
case 'R' : car_right();
matrix_display(clear);
matrix_display(right);
break;
case 'S' : car_Stop();
matrix_display(clear);
matrix_display(STOP01);
break;
case 'a' : speeds_a();
matrix_display(clear);
matrix_display(speed_a);
break;
case 'd' : speeds_d();
matrix_display(clear);
matrix_display(speed_d);
break;
case 'U': follow(); //Ricevuto ‘U’, entra in modalità follow
break;
case 'Y': avoid(); //Ricevuto ‘Y’, entra in modalità evitamento ostacoli
break;
case 'G': confinement(); //Ricevuto ‘G’, entra in modalità confinamento
break;
case 'X': tracking(); //Ricevuto ‘X’, entra in modalità tracciamento
break;
}
}
void car_front()//definisce lo stato di avanzamento
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,(255-speeds));
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,(255-speeds));
}
void car_back()//definisce lo stato di retromarcia
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,speeds);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,speeds);
}
void car_left()//imposta lo stato di svolta a sinistra
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, speeds);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, (255-speeds));
}
void car_right()//imposta lo stato di svolta a destra
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, (255-speeds));
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, speeds);
}
void car_Stop()//definisce lo stato di stop
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void speeds_a() { //funzione di accelerazione rapida
while (1) {
Serial.println(speeds); //visualizza le informazioni sulla velocità
if (speeds < 255) { //fino a 255
matrix_display(clear);
matrix_display(speed_a);
speeds++;
delay(10); //regola la velocità di crescita
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Ricevuto 'S', l'auto smette di accelerare
break;
}
}
void speeds_d() { //funzione di decelerazione
while (1) {
Serial.println(speeds); //visualizza le informazioni sulla velocità
if (speeds > 0) { //fino a 0
matrix_display(clear);
matrix_display(speed_d);
speeds--;
delay(10); //regola la velocità di decelerazione
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Ricevuto 'S', l'auto smette di decelerare
break;
}
}
int get_distance() {
int distance = 0;
digitalWrite(trigPin, LOW); // invia impulso tramite Trig/Pin, attiva il rilevamento HC-SR04, così da inviare il segnale ultrasonico a livello basso per 2μs
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // imposta il segnale ultrasonico a livello alto per 10μs, qui almeno 10μs
delayMicroseconds(10);
digitalWrite(trigPin, LOW); // mantiene il segnale ultrasonico a livello basso
distance = pulseIn(echoPin, HIGH) / 58; // legge il tempo dell'impulso e converte il tempo in distanza (unità: cm)
Serial.println(distance); // output valore distanza
return distance;
}
void follow() {
servopulse(servopin,90);
delay(200);
int follow_flag = 1;
while (follow_flag) {
distance = get_distance(); //chiama la funzione di rilevamento
if (distance < 8 ) {//Se la distanza è inferiore a 8
car_back();//la macchina va indietro
matrix_display(clear);
matrix_display(back);
}
else if (distance >= 8 && distance < 13) { //Se la distanza è maggiore o uguale a 8, ma inferiore a 13
car_Stop();//ferma
matrix_display(clear);
matrix_display(STOP01);
}
else if (distance >= 13 && distance <= 35 ) { //Se la distanza è maggiore o uguale a 13, ma inferiore o uguale a 35
car_front();//la macchina va avanti
matrix_display(clear);
matrix_display(front);
}
else {//Se nessuna delle condizioni precedenti
car_Stop();//ferma
matrix_display(clear);
matrix_display(STOP01);
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Quando viene ricevuta la S, la macchina si ferma
follow_flag = 0;
car_Stop();
}
}
}
void avoid() {
int avoid_flag = 1;
while (avoid_flag) {
distance = get_distance(); //Chiama la funzione di rilevamento
if (distance > 0 && distance < 20) { //Se la distanza è inferiore a 20 e maggiore di 0
car_Stop();//si ferma
matrix_display(clear);
matrix_display(STOP01); //la matrice a punti mostra un pattern di stop
delay(1000);
servopulse(servopin,160); //porta il servocomando oltre 180 gradi
delay(500);
distance_l = get_distance(); //ottiene la distanza a sinistra
delay(100);
servopulse(servopin,20); //gira il servocomando a 0 gradi
delay(500);
distance_r = get_distance(); //ottiene la distanza a destra
delay(100);
if (distance_l > distance_r) { //confronta le distanze, se la sinistra è maggiore della destra
car_left(); //la macchina gira a sinistra
matrix_display(clear);
matrix_display(left); //la matrice a punti mostra un pattern a sinistra
servopulse(servopin,90);//il servocomando ritorna a 90 gradi
delay(700);
matrix_display(clear);
matrix_display(front); //la matrice a punti mostra un pattern avanti
}
else { //Altrimenti se la destra è maggiore della sinistra
car_right();//la macchina gira a destra
matrix_display(clear);
matrix_display(right); //la matrice a punti mostra un pattern a destra
servopulse(servopin,90);//il servocomando ritorna a 90 gradi
delay(700);
matrix_display(clear);
matrix_display(front); //la matrice a punti mostra un pattern avanti
}
}
else { //Quando la distanza frontale è maggiore o uguale a 20cm
car_front();//la macchina va avanti
matrix_display(clear);
matrix_display(front); //la matrice a punti mostra un pattern avanti
}
BLE_val = Serial.read();
if (BLE_val == 'S') {//Quando viene ricevuta la S, la macchina si ferma
avoid_flag = 0;
car_Stop();
}
}
}
void confinement() {
int confinement_flag = 1;
while (confinement_flag) {
L_val = digitalRead(L_pin); //leggi il valore del sensore sinistro
M_val = digitalRead(M_pin); //leggi il valore del sensore centrale
R_val = digitalRead(R_pin); //leggi il valore del sensore destro
if ( L_val == 0 && M_val == 0 && R_val == 0 ) { //la macchina va avanti quando non viene rilevata alcuna linea nera
car_front();
}
else { //Altrimenti, se uno qualsiasi dei sensori di tracciamento rileva una linea nera, la macchina va indietro e poi gira a sinistra
car_back();
delay(500);
car_left();
delay(800);
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Quando viene ricevuta la S, la macchina si ferma
confinement_flag = 0;
car_Stop();
}
}
}
void tracking() {
int track_flag = 1;
while (track_flag) {
L_val = digitalRead(L_pin); //leggi il valore del sensore sinistro
M_val = digitalRead(M_pin); //leggi il valore del sensore centrale
R_val = digitalRead(R_pin); //leggi il valore del sensore destro
if (M_val == 1) { //Linea nera rilevata al centro
if (L_val == 1 && R_val == 0) { //Se una linea nera è rilevata a sinistra, ma non a destra, gira a sinistra
car_left();
}
else if (L_val == 0 && R_val == 1) { //Altrimenti, se una linea nera è rilevata a destra e non a sinistra, gira a destra
car_right();
}
else { //Altrimenti, la macchina va avanti
car_front();
}
}
else { //nessuna linea nera rilevata al centro
if (L_val == 1 && R_val == 0) { //Se una linea nera è rilevata a sinistra, ma non a destra, gira a sinistra
car_right();
}
else if (L_val == 0 && R_val == 1) { //Altrimenti, se una linea nera è rilevata a destra e non a sinistra, gira a destra
car_right();;
}
else { //Altrimenti, ferma la macchina
car_Stop();
}
}
BLE_val = Serial.read();
if (BLE_val == 'S') { //Quando viene ricevuta la S, la macchina si ferma
track_flag = 0;
car_Stop();
}
}
}
void servopulse(int servopin,int myangle)//Angolo di funzionamento del servocomando
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//questa funzione è usata per il display a matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la funzione che chiama la condizione di inizio trasferimento dati
IIC_send(0xc0); //seleziona indirizzo
for (int i = 0; i < 16; i++) // i dati del pattern sono 16 byte
{
IIC_send(matrix_value[i]); //Trasmetti i dati del pattern
}
IIC_end(); //Termina la trasmissione dei dati del pattern
IIC_start();
IIC_send(0x8A); //Controllo display, seleziona larghezza impulso 4/16
IIC_end();
}
//Condizioni in cui inizia la trasmissione dei dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica la fine della trasmissione dei dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//trasmetti dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Ogni byte ha 8 bit e viene controllato bit per bit a partire dal livello più basso
{
if (send_data & mask) { //Imposta i livelli alto e basso di SDA_Pin a seconda che ogni bit del byte sia 1 o 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Porta alto il pin clock SCL_Pin per fermare la trasmissione dei dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //Porta basso il pin clock SCL_Pin per cambiare il SEGNALE di SDA
}
}
//*******************************************************************************
5. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo lo schema elettrico, alimenta la fonte esterna e poi porta l’interruttore DIP su ON.
Dopo che il modulo Bluetooth è stato collegato all’APP e l’APP mobile si è connessa con successo al Bluetooth, l’auto intelligente può essere controllata tramite l’APP mobile. Possiamo ottenere le funzioni corrispondenti premendo i pulsanti corrispondenti sull’APP mobile.