Progetto 16 Controllo Velocità Bluetooth Smart Car

1.Descrizione
In questo progetto, utilizzeremo un modulo Bluetooth per regolare la velocità della smart car. Consentiamo di definire velocità variabili e modificarle per cambiare la velocità della smart car.
2.Diagramma di Flusso
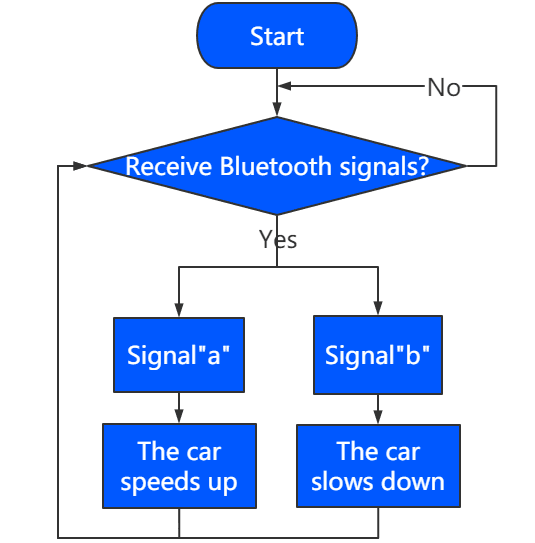
3.Diagramma di Collegamento
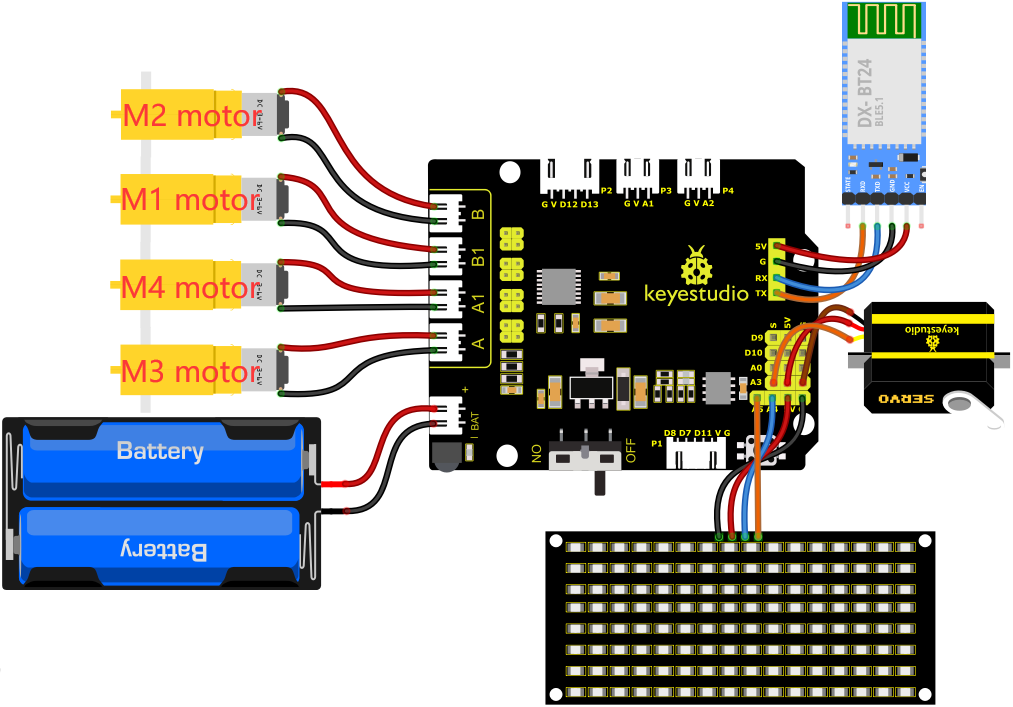
1). GND, VCC, SDA e SCL della scheda LED 8*8 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). RXD, TXD, GND e VCC del modulo Bluetooth sono collegati rispettivamente a TX, RX, G e 5V sullo Shield motore 8833, mentre i pin STATE e BRK del modulo Bluetooth non devono essere collegati.
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso a 5V (V) e il filo arancione a A3.
4). L’alimentazione è collegata alla porta BAT.
4.Codice di Test
Nota: Prima di caricare il codice di test, è necessario rimuovere il modulo Bluetooth, altrimenti il caricamento del codice fallirà. Collegare il modulo Bluetooth dopo aver caricato con successo il codice.
//*******************************************************************************
/*
keyestudio 4wd BT Car
lesson 16
Bluetooth Speed Control Car
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Imposta il pin clock su A5
#define SDA_Pin A4 //Imposta il pin dati su A4
//Array, usato per memorizzare i dati del pattern, può essere calcolato da soli o ottenuto dallo strumento modulo
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char speed_a[] =
{0x00,0x40,0x20,0x10,0x08,0x04,0x02,0xff,0x02,0x04,0x08,0x10,0x20,0x40,0x00,0x00};
unsigned char speed_d[] =
{0x00,0x02,0x04,0x08,0x10,0x20,0x40,0xff,0x40,0x20,0x10,0x08,0x04,0x02,0x00,0x00};
int left_ctrl = 2;//definisce i pin di controllo direzione del motore gruppo B
int left_pwm = 5;//definisce i pin di controllo PWM del motore gruppo B
int right_ctrl = 4;//definisce i pin di controllo direzione del motore gruppo A
int right_pwm = 6;//definisce i pin di controllo PWM del motore gruppo A
int speeds = 150; //Imposta la velocità iniziale a 150
const int servopin = A3;//imposta il pin del servo su A3
char BLE_val;
void setup() {
Serial.begin(9600);//
pinMode(left_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo B come OUTPUT
pinMode(left_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo B come OUTPUT
pinMode(right_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo A come OUTPUT
pinMode(right_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo A come OUTPUT
servopulse(servopin,90);//l'angolo del servo è 90 gradi
delay(300);
pinMode(SCL_Pin,OUTPUT);// Imposta il pin clock come output
pinMode(SDA_Pin,OUTPUT);//Imposta il pin dati come output
matrix_display(clear);
matrix_display(start01); //mostra il pattern start01
}
void loop() {
if(Serial.available()>0) {
BLE_val = Serial.read();
Serial.println(BLE_val);
}
switch(BLE_val)
{
case 'F' : car_front();
matrix_display(clear);
matrix_display(front);
break;
case 'B' : car_back();
matrix_display(clear);
matrix_display(back);
break;
case 'L' : car_left();
matrix_display(clear);
matrix_display(left);
break;
case 'R' : car_right();
matrix_display(clear);
matrix_display(right);
break;
case 'S' : car_Stop();
matrix_display(clear);
matrix_display(STOP01);
break;
case 'a' : speeds_a();
matrix_display(clear);
matrix_display(speed_a);
break;
case 'd' : speeds_d();
matrix_display(clear);
matrix_display(speed_d);
break;
}
}
void car_front()//definisce lo stato di avanzamento
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,(255-speeds));
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,(255-speeds));
}
void car_back()//definisce lo stato di retromarcia
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,speeds);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,speeds);
}
void car_left()//imposta lo stato di svolta a sinistra
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, speeds);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, (255-speeds));
}
void car_right()//imposta lo stato di svolta a destra
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, (255-speeds));
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, speeds);
}
void car_Stop()//definisce lo stato di stop
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void speeds_a() { //funzione di accelerazione rapida
while (1) {
Serial.println(speeds); //mostra le informazioni sulla velocità
if (speeds < 255) { //fino a 255
matrix_display(clear);
matrix_display(speed_a);
speeds++;
delay(10); //regola la velocità di crescita
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Riceve 'S', l'auto smette di accelerare
break;
}
}
void speeds_d() { //funzione di decelerazione
while (1) {
Serial.println(speeds); //mostra le informazioni sulla velocità
if (speeds > 0) { //fino a 0
matrix_display(clear);
matrix_display(speed_d);
speeds--;
delay(10); //regola la velocità di decelerazione
}
BLE_val = Serial.read();
if (BLE_val == 'S') //Riceve 'S', l'auto smette di decelerare
break;
}
}
void servopulse(int servopin,int myangle)//Angolo di funzionamento del servocomando
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//questa funzione è usata per la visualizzazione a matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la funzione che richiama la condizione di inizio trasferimento dati
IIC_send(0xc0); //seleziona l'indirizzo
for (int i = 0; i < 16; i++) //i dati del pattern sono 16 byte
{
IIC_send(matrix_value[i]); //Trasmetti i dati del pattern
}
IIC_end(); //Termina la trasmissione dei dati del pattern
IIC_start();
IIC_send(0x8A); //Controllo display, seleziona larghezza impulso 4/16
IIC_end();
}
//Condizioni in cui inizia la trasmissione dei dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica la fine della trasmissione dei dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//trasmetti dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Ogni byte ha 8 bit e viene controllato bit per bit iniziando dal livello più basso
{
if (send_data & mask) { //Imposta i livelli alto e basso di SDA_Pin a seconda che ogni bit del byte sia 1 o 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Porta alto il pin clock SCL_Pin per fermare la trasmissione dei dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //Porta basso il pin clock SCL_Pin per cambiare il SEGNALE di SDA
}
}
//*******************************************************************************
5. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo lo schema elettrico, alimenta la fonte di alimentazione esterna e poi porta l’interruttore DIP su ON. Associa l’APP tramite Bluetooth, l’auto intelligente può essere controllata dall’APP per muoversi.
Premi  , l’auto accelererà, premi
, l’auto accelererà, premi  , l’auto rallenterà, e la scheda LED 8*16 mostrerà il pattern di stato corrispondente dell’auto intelligente.
, l’auto rallenterà, e la scheda LED 8*16 mostrerà il pattern di stato corrispondente dell’auto intelligente.