Progetto 15 Auto Intelligente Controllata via Bluetooth

1.Descrizione
Abbiamo appreso le conoscenze di base del Bluetooth. In questa lezione, realizzeremo un’auto intelligente controllata via Bluetooth. In questo progetto, consideriamo il telefono cellulare come trasmettitore (host) e l’auto intelligente collegata al modulo Bluetooth BT24 (slave) come ricevitore, utilizzando l’APP mobile per controllare l’auto tramite Bluetooth.
2.Pulsanti di Controllo APP
Carattere di controllo |
Carattere di controllo |
|
|---|---|---|
|
Premuto: F |
Premi il pulsante, l’auto va avanti; |
|
Premuto: L |
Premi il pulsante, l’auto gira a sinistra; |
|
Premuto: R |
Premi il pulsante, l’auto gira a destra; |
|
Premuto: B |
Premi il pulsante, l’auto va indietro; |
|
Premuto: “a” |
Clicca per accelerare (massimo: 255) |
|
Premuto: “d” |
Clicca per rallentare (minimo: 0) |
|
Clicca per avviare la funzione di |
|
|
Clicca per inviare “X”, |
Avvia la funzione di tracciamento linea; |
|
Clicca per inviare “Y”, |
Avvia la funzione di evitamento ad ultrasuoni; |
|
Clicca per inviare “U”, |
Avvia la funzione di inseguimento ad ultrasuoni; |
|
Clicca per inviare “G”, |
Avvia la funzione di restrizione; |











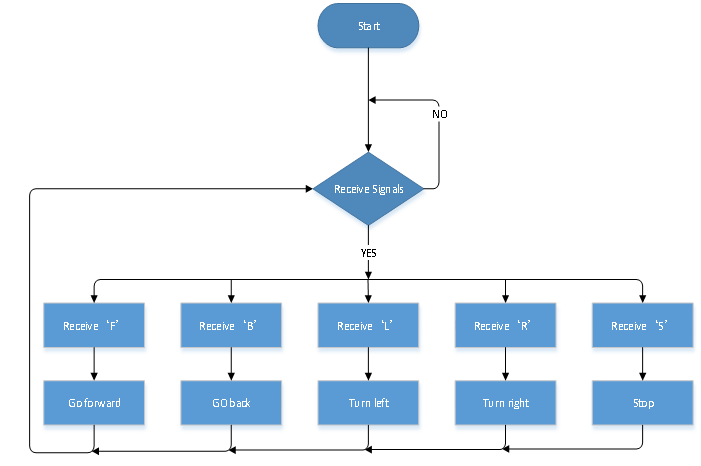
3.Diagramma di Flusso
4.Diagramma di Collegamento
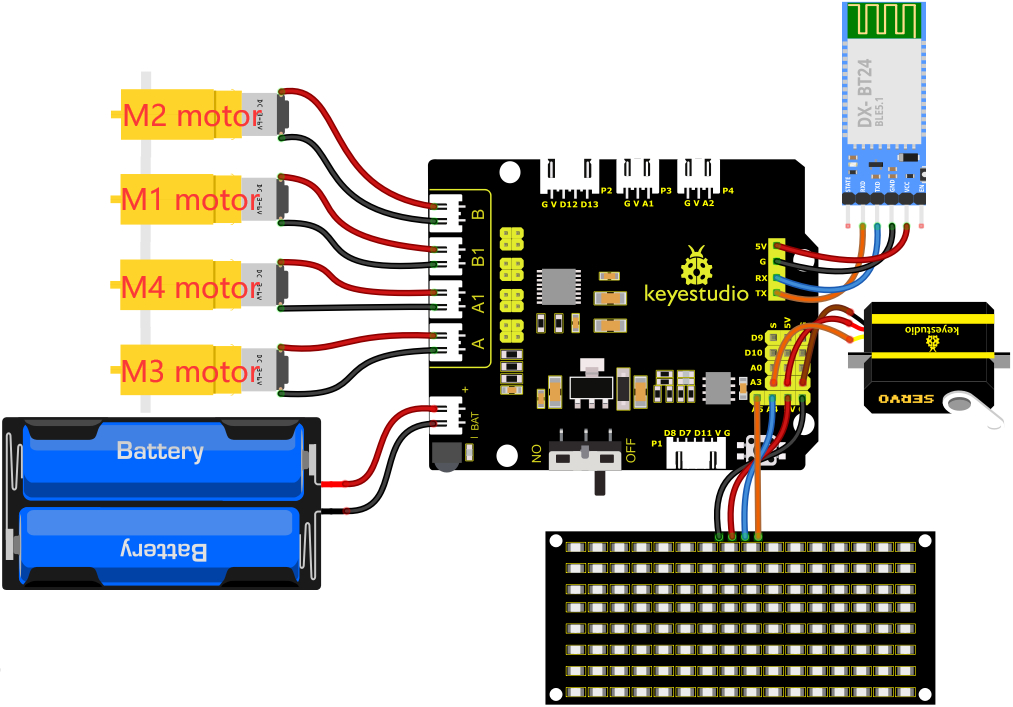
1). GND, VCC, SDA e SCL della scheda LED 8*8 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). RXD, TXD, GND e VCC del modulo Bluetooth sono collegati rispettivamente a TX, RX, G e 5V sul motor Shield 8833, mentre i pin STATE e BRK del modulo Bluetooth non devono essere collegati.
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso a 5V (V) e il filo arancione ad A3.
4). L’alimentazione è collegata alla porta BAT
5.Codice di Test
Nota: Prima di caricare il codice di test, è necessario rimuovere il modulo Bluetooth, altrimenti il codice non verrà caricato correttamente. Collegare il modulo Bluetooth dopo aver caricato con successo il codice.
//*******************************************************************************
/*
keyestudio 4wd BT Car
lezione 15
Controllo Bluetooth dell'auto
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Imposta il pin clock su A5
#define SDA_Pin A4 //Imposta il pin dati su A4
//Array, usato per memorizzare i dati del pattern, può essere calcolato da soli o ottenuto dallo strumento modulo
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
int left_ctrl = 2;//definisce i pin di controllo direzione del motore gruppo B
int left_pwm = 5;//definisce i pin di controllo PWM del motore gruppo B
int right_ctrl = 4;//definisce i pin di controllo direzione del motore gruppo A
int right_pwm = 6;//definisce i pin di controllo PWM del motore gruppo A
const int servopin = A3;//imposta il pin del servo su A3
char BLE_val;
void setup() {
Serial.begin(9600);//
pinMode(left_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo B come OUTPUT
pinMode(left_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo B come OUTPUT
pinMode(right_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo A come OUTPUT
pinMode(right_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo A come OUTPUT
servopulse(servopin,90);//l'angolo del servo è 90 gradi
delay(300);
pinMode(SCL_Pin,OUTPUT);// Imposta il pin clock come output
pinMode(SDA_Pin,OUTPUT);//Imposta il pin dati come output
matrix_display(clear);
matrix_display(start01); //mostra il pattern start01
}
void loop() {
if(Serial.available()>0) {
BLE_val = Serial.read();
Serial.println(BLE_val);
}
switch(BLE_val)
{
case 'F' : car_front(); //Riceve 'F', l'auto va avanti
matrix_display(clear);
matrix_display(front);
break;
case 'B' : car_back(); //Riceve 'B', l'auto va indietro
matrix_display(clear);
matrix_display(back);
break;
case 'L' : car_left(); //Riceve 'L', l'auto ruota a sinistra
matrix_display(clear);
matrix_display(left);
break;
case 'R' : car_right();//Riceve 'R', l'auto ruota a destra
matrix_display(clear);
matrix_display(right);
break;
case 'S' : car_Stop();//Riceve 'S', l'auto si ferma
matrix_display(clear);
matrix_display(STOP01);
break;
}
}
void car_front()//definisce lo stato di andare avanti
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,155);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,155);
}
void car_back()//definisce lo stato di andare indietro
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,100);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,100);
}
void car_left()//imposta lo stato di sterzata a sinistra
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//imposta lo stato di sterzata a destra
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//definisce lo stato di stop
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void servopulse(int servopin,int myangle)//Angolo di rotazione del servomotore
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//questa funzione è utilizzata per il display a matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la funzione che richiama la condizione di inizio trasferimento dati
IIC_send(0xc0); //seleziona indirizzo
for (int i = 0; i < 16; i++) //i dati del pattern sono 16 byte
{
IIC_send(matrix_value[i]); //Trasmette i dati del pattern
}
IIC_end(); //Fine trasmissione dati pattern
IIC_start();
IIC_send(0x8A); //Controllo display, seleziona larghezza impulso 4/16
IIC_end();
}
//Condizioni sotto le quali inizia la trasmissione dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica la fine della trasmissione dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//trasmette dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Ogni byte ha 8 bit e viene controllato bit per bit partendo dal livello più basso
{
if (send_data & mask) { //Imposta i livelli alto e basso di SDA_Pin a seconda che ogni bit del byte sia 1 o 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Porta alto il pin clock SCL_Pin per fermare la trasmissione dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //porta basso il pin clock SCL_Pin per cambiare il SEGNALE di SDA
}
}
//*******************************************************************************
6. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo lo schema elettrico, alimenta la scheda con alimentazione esterna e poi porta l’interruttore DIP su ON.
Inserisci il modulo BT e apri il cellulare per connettere il Bluetooth e controllare l’auto intelligente. L’auto si muoverà avanti, indietro, girerà a sinistra e a destra e si fermerà. Inoltre, la scheda LED 8*8 mostrerà i pattern corrispondenti.