Progetto 8 Guida del Motore e Controllo della Velocità
1.Descrizione
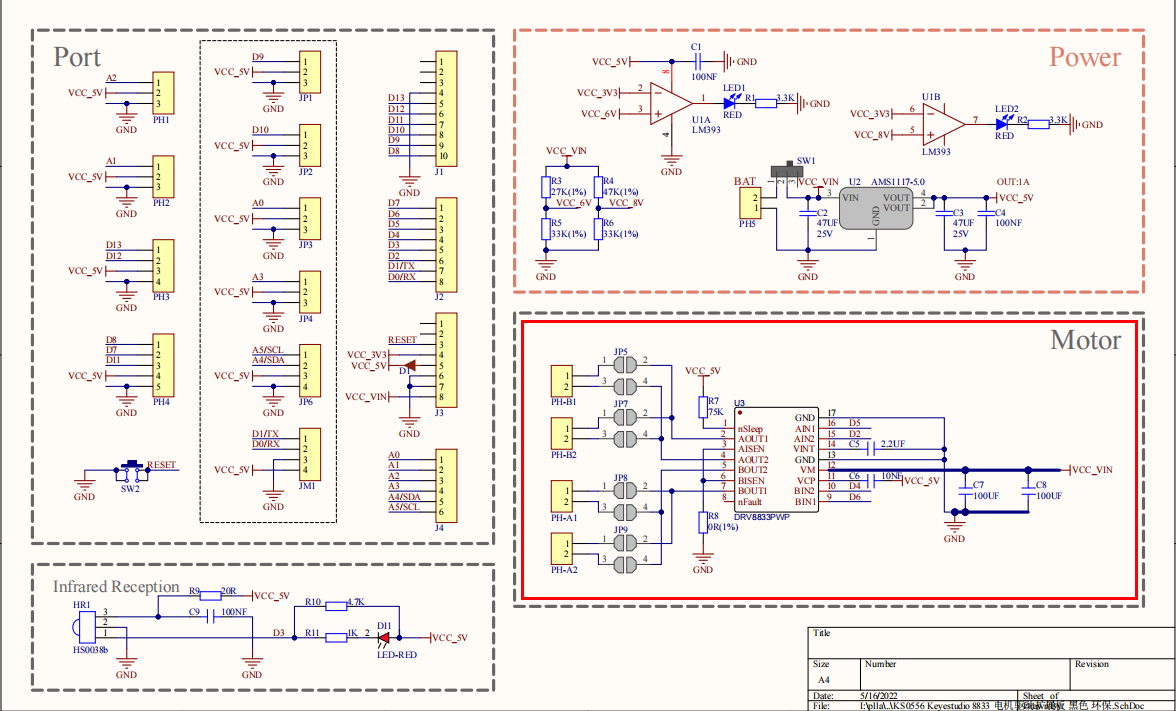
Esistono molti modi per pilotare i motori. La nostra auto utilizza il chip driver per motori DRV8833 più comunemente usato, che fornisce una soluzione di guida elettrica a ponte a due canali per giocattoli, stampanti e altre applicazioni integrate con motori.
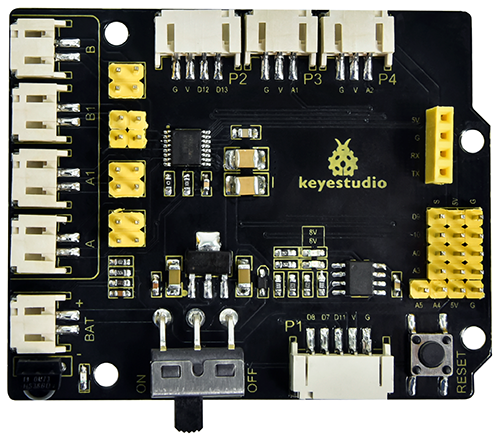
Quando impiliamo lo Shield sulla scheda di sviluppo 4.0 e accendiamo il BAT, quindi impostiamo l’interruttore DIP sull’estremità ON, l’alimentazione esterna alimenterà contemporaneamente le due schede. Per facilitare le connessioni dei cavi, lo Shield è dotato di una porta anti-inversione (PH2.0-2P-3P-4P-5P). Puoi collegare direttamente i motori, l’alimentazione e i moduli sensore allo Shield.
L’interfaccia Bluetooth dello Shield è completamente compatibile con il modulo Bluetooth DX-BT24 5.1. Quando colleghi il modulo Bluetooth, devi solo inserirlo nell’interfaccia corrispondente. Allo stesso tempo, i pin a fila da 2,54 mm sono utilizzati per estrarre alcune porte digitali e analogiche inutilizzate sullo Shield, rendendolo accessibile per aggiungere altri sensori e realizzare esperimenti di estensione.
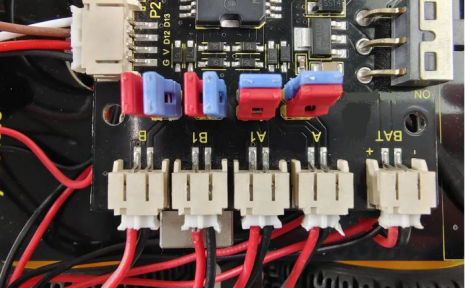
La scheda di espansione può essere collegata a quattro motori DC. Quando il cappuccio jumper è collegato di default, i motori delle porte A e A1 e B e B1 sono collegati in parallelo e hanno la stessa legge di movimento. 8 cappucci jumper possono essere usati per controllare la direzione di rotazione delle 4 interfacce motore.
Ad esempio, quando i 2 cappucci jumper davanti a B1 del motore M1 cambiano da collegamento trasversale a collegamento longitudinale, la direzione di rotazione del motore M1 sarà opposta alla direzione di rotazione originale.
2.Specifiche
Tensione di ingresso per la logica: DC 5V
Tensione di ingresso per la guida: DC 6-9 V
Corrente di lavoro per la logica: <36mA
Corrente di lavoro per la guida: <2A
Massima dissipazione di potenza: 25W(T=75℃)
Livello di ingresso per il segnale di controllo: livello alto è 2.3V<Vin<5V, livello basso è -0.3V<Vin<1.5V
Temperatura di lavoro: -25+130℃
Scheda di espansione driver motore Keyestudio 8833
3.Principio di Funzionamento
Utilizziamo la modalità di collegamento parallelo sullo stesso lato per i quattro motori, che possono essere considerati come due gruppi di motori. Come mostrato nel diagramma di cablaggio, B e B1 sono un gruppo, e A e A1 sono un gruppo.
I motori dello stesso gruppo devono ruotare nella stessa direzione. Se sono diversi, regola i cappucci jumper corrispondenti accanto al terminale per cambiare la direzione.
Come mostrato di seguito, se le direzioni di A e A1 sono diverse, regola la direzione dei cappucci jumper finché la direzione di movimento dei motori dello stesso gruppo non è coerente.
Dal diagramma sopra si evince che il pin di direzione del motore A è D4, il pin di velocità è D6; D2 è il pin di direzione del motore B; e D6 è il pin di velocità.
Il PWM guida l’auto robot. Il valore PWM è nell’intervallo 0-255. Quando impostiamo la direzione su HIGH, più piccolo è il numero PWM, più veloce è la rotazione del motore.
D2 |
D5(PWM) |
Motore B(sinistro) |
D4 |
D6(PWM) |
Motore A(destro) |
|
|---|---|---|---|---|---|---|
Avanti |
HIGH |
255-200 |
Ruota in senso orario |
HIGH |
255-200 |
Ruota in senso orario |
Indietro |
LOW |
200 |
Ruota in senso antiorario |
LOW |
200 |
Ruota in senso antiorario |
Svolta a sinistra |
HIGH |
255-200 |
Ruota in senso orario |
LOW |
200 |
Ruota in senso antiorario |
Svolta a destra |
LOW |
200 |
Ruota in senso antiorario |
HIGH |
255-200 |
Ruota in senso orario |
4.Componenti
Development Board *1 |
8833 Motor Driver *1 |
USB Cable*1 |
|---|---|---|
|
|
|
18650 Battery Holder*1 |
Motor*4 |
18650 Battery *2(self-provided) |
|
|
|





5.Diagramma di Collegamento
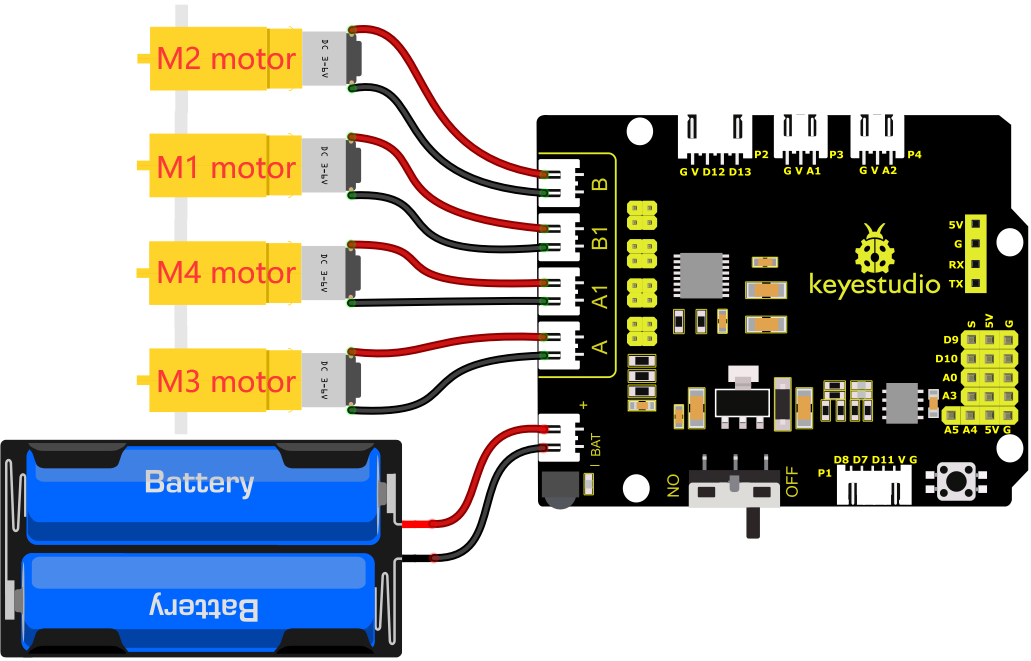
Collegare l’alimentazione alla porta BAT.
6.Codice di Test
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 8.1
Motor driver shield
http://www.keyestudio.com
*/
#define ML_Ctrl 2 //definisce i pin di controllo direzione del motore gruppo B
#define ML_PWM 5 //definisce i pin di controllo PWM del motore gruppo B
#define MR_Ctrl 4 //definisce i pin di controllo direzione del motore gruppo A
#define MR_PWM 6 //definisce i pin di controllo PWM del motore gruppo A
void setup()
{
pinMode(ML_Ctrl, OUTPUT);//imposta i pin di controllo direzione del motore gruppo B come output
pinMode(ML_PWM, OUTPUT);//imposta i pin di controllo PWM del motore gruppo B come output
pinMode(MR_Ctrl, OUTPUT);//imposta i pin di controllo direzione del motore gruppo A come output
pinMode(MR_PWM, OUTPUT);//imposta i pin di controllo PWM del motore gruppo A come output
}
void loop()
{
//avanti
digitalWrite(ML_Ctrl,HIGH);//imposta i pin di controllo direzione del motore gruppo B a HIGH
analogWrite(ML_PWM,55);//imposta la velocità PWM del motore gruppo B a 55
digitalWrite(MR_Ctrl,HIGH);//imposta i pin di controllo direzione del motore gruppo A a HIGH
analogWrite(MR_PWM,55);//imposta la velocità PWM del motore gruppo A a 55
delay(2000);//ritardo di 2000ms
//indietro
digitalWrite(ML_Ctrl,LOW);//imposta i pin di controllo direzione del motore gruppo B a livello LOW
analogWrite(ML_PWM,200);//imposta la velocità PWM del motore gruppo B a 200
digitalWrite(MR_Ctrl,LOW);//imposta i pin di controllo direzione del motore gruppo A a livello LOW
analogWrite(MR_PWM,200);//imposta la velocità PWM del motore gruppo A a 200
delay(2000);//ritardo di 2000ms
//sinistra
digitalWrite(ML_Ctrl,LOW);//imposta i pin di controllo direzione del motore gruppo B a livello LOW
analogWrite(ML_PWM,200);//imposta la velocità PWM del motore gruppo B a 200
digitalWrite(MR_Ctrl,HIGH);//imposta i pin di controllo direzione del motore gruppo A a livello HIGH
analogWrite(MR_PWM,55);//imposta la velocità PWM del motore gruppo A a 55
delay(2000);//ritardo di 2000ms
//destra
digitalWrite(ML_Ctrl,HIGH);//imposta i pin di controllo direzione del motore gruppo B a livello HIGH
analogWrite(ML_PWM,55);//imposta la velocità PWM del motore gruppo B a 55
digitalWrite(MR_Ctrl,LOW);//imposta i pin di controllo direzione del motore gruppo A a livello LOW
analogWrite(MR_PWM,200);//imposta la velocità PWM del motore gruppo A a 200
delay(2000);//ritardo di 2000ms
//fermo
digitalWrite(ML_Ctrl, LOW);//imposta i pin di controllo direzione del motore gruppo B a livello LOW
analogWrite(ML_PWM,0);//imposta la velocità PWM del motore gruppo B a 0
digitalWrite(MR_Ctrl, LOW);//imposta i pin di controllo direzione del motore gruppo A a livello LOW
analogWrite(MR_PWM,0);//imposta la velocità PWM del motore gruppo A a 0
delay(2000);//ritardo di 2000ms
}
//****************************************************************************
7.Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i fili secondo il diagramma di collegamento, quindi accendere l’alimentazione esterna e impostare l’interruttore DIP su ON, la macchina si muoverà in avanti per 2s, indietro per 2s, girerà a sinistra per 2s, a destra per 2s e si fermerà per 2s.
8.Spiegazione del Codice
digitalWrite(ML_Ctrl,LOW): La direzione di rotazione del motore è decisa dal livello alto/basso e i pin che decidono la direzione di rotazione sono pin digitali.
analogWrite(ML_PWM,200): La velocità del motore è regolata tramite PWM, e i pin che decidono la velocità del motore devono essere pin PWM.
9.Spiegazione del Codice
Regola la velocità con cui il PWM controlla il motore, collegalo nello stesso modo.
//************************************************************************
/*
keyestudio 4wd BT Car
lesson 8.2
Motor driver
http://www.keyestudio.com
*/
#define ML_Ctrl 2 //definisci i pin di controllo della direzione del motore del gruppo B
#define ML_PWM 5 //definisci i pin di controllo PWM del motore del gruppo B
#define MR_Ctrl 4 //definisci i pin di controllo della direzione del motore del gruppo A
#define MR_PWM 6 //definisci i pin di controllo PWM del motore del gruppo A
void setup()
{
pinMode(ML_Ctrl, OUTPUT);//imposta i pin di controllo della direzione del motore del gruppo B come output
pinMode(ML_PWM, OUTPUT);//imposta i pin di controllo PWM del motore del gruppo B come output
pinMode(MR_Ctrl, OUTPUT);//imposta i pin di controllo della direzione del motore del gruppo A come output
pinMode(MR_PWM, OUTPUT);//imposta i pin di controllo PWM del motore del gruppo A come output
}
void loop()
{
//avanti
digitalWrite(ML_Ctrl,HIGH);//imposta i pin di controllo della direzione del motore del gruppo B su HIGH
analogWrite(ML_PWM,105);//imposta la velocità di controllo PWM del motore del gruppo B a 55
digitalWrite(MR_Ctrl,HIGH);//imposta i pin di controllo della direzione del motore del gruppo A su HIGH
analogWrite(MR_PWM,105);//imposta la velocità di controllo PWM del motore del gruppo A a 55
delay(2000);//ritardo di 2000ms
//indietro
digitalWrite(ML_Ctrl,LOW);//imposta i pin di controllo della direzione del motore del gruppo B su livello LOW
analogWrite(ML_PWM,150);//imposta la velocità di controllo PWM del motore del gruppo B a 200
digitalWrite(MR_Ctrl,LOW);//imposta i pin di controllo della direzione del motore del gruppo A su livello LOW
analogWrite(MR_PWM,150);//imposta la velocità di controllo PWM del motore del gruppo A a 200
delay(2000);//ritardo di 2000ms
//sinistra
digitalWrite(ML_Ctrl,LOW);//imposta i pin di controllo della direzione del motore del gruppo B su livello LOW
analogWrite(ML_PWM,150);//imposta la velocità di controllo PWM del motore del gruppo B a 200
digitalWrite(MR_Ctrl,HIGH);//imposta i pin di controllo della direzione del motore del gruppo A su livello HIGH
analogWrite(MR_PWM,105);//imposta la velocità di controllo PWM del motore del gruppo A a 200
delay(2000);//ritardo di 2000ms
//destra
digitalWrite(ML_Ctrl,HIGH);//imposta i pin di controllo della direzione del motore del gruppo B su livello HIGH
analogWrite(ML_PWM,105);//imposta la velocità di controllo PWM del motore del gruppo B a 55
digitalWrite(MR_Ctrl,LOW);//imposta i pin di controllo della direzione del motore del gruppo A su livello LOW
analogWrite(MR_PWM,150);//imposta la velocità di controllo PWM del motore del gruppo A a 200
delay(2000);//ritardo di 2000ms
//stop
digitalWrite(ML_Ctrl, LOW);//imposta i pin di controllo della direzione del motore del gruppo B su livello LOW
analogWrite(ML_PWM,0);//imposta la velocità di controllo PWM del motore del gruppo B a 0
digitalWrite(MR_Ctrl, LOW);//imposta i pin di controllo della direzione del motore del gruppo A su livello LOW
analogWrite(MR_PWM,0);//imposta la velocità di controllo PWM del motore del gruppo A a 0
delay(2000);//ritardo di 2000ms
}
//************************************************************************
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo lo schema elettrico, quindi accendi l’alimentazione esterna e porta l’interruttore DIP su ON, noterai che la velocità del motore è molto più lenta.
Nota: Una batteria scarica porterà a una velocità del motore più lenta.