Progetto 14 Auto Intelligente Controllata da Telecomando IR
1.Descrizione
In questo progetto, realizzeremo un’auto intelligente controllata da telecomando IR e premeremo il pulsante sul telecomando IR per far muovere l’auto.
2.Diagramma di Flusso

La logica specifica dell’auto intelligente controllata da telecomando IR è mostrata di seguito:
Configurazione iniziale |
La scheda LED mostra una faccina sorridente |
|
|---|---|---|
Telecomando |
Valore tasto |
Stato tasto |
|
FF629D |
Avanti La scheda LED 8*8 mostra l’icona avanti |
|
FFA857 |
Indietro La scheda LED 8*8 mostra l’icona indietro |
|
FF22DD |
Ruota a sinistra La scheda LED 8*8 mostra l’icona verso sinistra |
|
FFC23D |
Ruota a destra La scheda LED 8*8 mostra l’icona verso destra |
|
FF02FD |
Stop La scheda LED 8*8 mostra “STOP” |





3.Diagramma dei Collegamenti
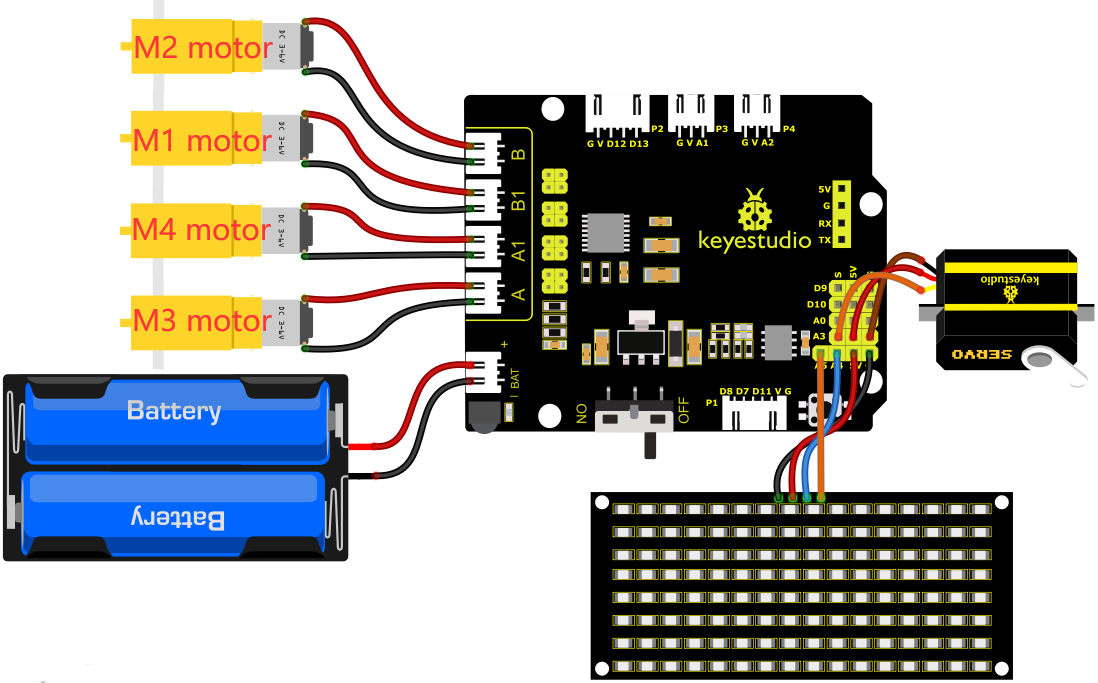
1). GND, VCC, SDA e SCL del modulo scheda LED 8*8 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). Poiché il ricevitore IR è integrato sulla Shield motore 8833, non è necessario alcun cablaggio aggiuntivo. I pin del ricevitore IR sulla scheda 8833 sono rispettivamente G (GND), V (VCC) e D3.
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso è collegato a 5V (V) e il filo arancione è collegato ad A3.
4). L’alimentazione è collegata alla porta BAT
4.Codice di Test
//*******************************************************************************
/*
keyestudio 4wd BT Car
lesson 14
IR remote Control Car
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Imposta il pin clock su A5
#define SDA_Pin A4 //Imposta il pin dati su A4
//Array, usato per memorizzare i dati del pattern, può essere calcolato da soli o ottenuto dallo strumento modulo
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
#include <Arduino.h>
#include <IRremote.h>//libreria per il controllo remoto IR
int RECV_PIN = 3;//imposta il pin del ricevitore IR su D3
IRrecv irrecv(RECV_PIN);
long irr_val;
decode_results results;
int left_ctrl = 2;//definisce i pin di controllo direzione del motore gruppo B
int left_pwm = 5;//definisce i pin di controllo PWM del motore gruppo B
int right_ctrl = 4;//definisce i pin di controllo direzione del motore gruppo A
int right_pwm = 6;//definisce i pin di controllo PWM del motore gruppo A
#include <Servo.h>
Servo servo_A3;//imposta il pin del servo su A3
unsigned char data_line = 0;
unsigned char delay_count = 0;
void setup() {
Serial.begin(9600);//
// Nel caso in cui il driver di interrupt si blocchi all'avvio, fornire un indizio
// all'utente su cosa sta succedendo.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // Avvia il ricevitore
Serial.println("Enabled IRin");
pinMode(left_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo B come OUTPUT
pinMode(left_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo B come OUTPUT
pinMode(right_ctrl,OUTPUT);//imposta i pin di controllo direzione del motore gruppo A come OUTPUT
pinMode(right_pwm,OUTPUT);//imposta i pin di controllo PWM del motore gruppo A come OUTPUT
servo_A3.attach(A3);
servo_A3.write(90);//l'angolo del servo è 90 gradi
delay(300);
pinMode(SCL_Pin,OUTPUT);// Imposta il pin clock come output
pinMode(SDA_Pin,OUTPUT);//Imposta il pin dati come output
matrix_display(clear);
matrix_display(start01); //mostra il pattern di espressione start01
}
void loop()
{
if (irrecv.decode(&results))
{
irr_val = results.value;
Serial.println(irr_val, HEX);//stampa seriale i segnali IR remoti letti
switch(irr_val)
{
case 0xFF629D : car_front(); //Riceve 0xFF629D, la macchina va avanti
matrix_display(clear);
matrix_display(front);
break;
case 0xFFA857 : car_back(); //Riceve 0xFFA857, la macchina va indietro
matrix_display(clear);
matrix_display(back);
break;
case 0xFF22DD : car_left(); //Riceve 0xFF22DD, la macchina ruota a sinistra
matrix_display(clear);
matrix_display(left);
break;
case 0xFFC23D : car_right();//Riceve 0xFFC23D, la macchina ruota a destra
matrix_display(clear);
matrix_display(right);
break;
case 0xFF02FD : car_Stop();//Riceve 0xFF02FD, la macchina si ferma
matrix_display(clear);
matrix_display(STOP01);
break;
}
irrecv.resume(); // Riceve il valore successivo
}
}
void car_front()//definisce lo stato di avanzamento
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,105);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,105);
}
void car_back()//definisce lo stato di retromarcia
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,150);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,150);
}
void car_left()//imposta lo stato di svolta a sinistra
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//imposta lo stato di svolta a destra
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//definisce lo stato di stop
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
//questa funzione è usata per la visualizzazione su matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //la funzione che chiama la condizione di inizio trasferimento dati
IIC_send(0xc0); //seleziona l'indirizzo
for (int i = 0; i < 16; i++) // i dati del pattern sono 16 byte
{
IIC_send(matrix_value[i]); //Trasmetti i dati del pattern
}
IIC_end(); //Termina la trasmissione dei dati del pattern
IIC_start();
IIC_send(0x8A); //Controllo display, seleziona larghezza impulso 4/16
IIC_end();
}
//Condizioni in cui inizia la trasmissione dei dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Indica la fine della trasmissione dei dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//trasmetti dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Ogni byte ha 8 bit e viene controllato bit per bit a partire dal livello più basso
{
if (send_data & mask) { //Imposta i livelli alto e basso di SDA_Pin a seconda che ogni bit del byte sia 1 o 0
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Porta alto il pin clock SCL_Pin per fermare la trasmissione dei dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //porta basso il pin clock SCL_Pin per cambiare il SEGNALE di SDA
}
}
//*******************************************************************************
5. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo lo schema elettrico, alimentare la fonte esterna e quindi impostare l’interruttore DIP su ON. Successivamente è possibile utilizzare il telecomando IR per guidare l’auto a muoversi e la scheda LED 8X16 mostrerà il pattern di stato corrispondente.