Progetto 6: Sensore a Ultrasuoni
(1) Descrizione:
Il sensore a ultrasuoni HC-SR04 utilizza il sonar per determinare la distanza da un oggetto, come fanno i pipistrelli. Offre un’eccellente rilevazione della distanza senza contatto, con alta precisione e letture stabili in un pacchetto facile da usare. È completo di moduli trasmettitore e ricevitore a ultrasuoni.
L’HC-SR04 o il sensore a ultrasuoni viene utilizzato in un’ampia gamma di progetti elettronici per creare applicazioni di rilevamento ostacoli e misurazione della distanza, oltre a varie altre applicazioni. Qui abbiamo presentato il metodo semplice per misurare la distanza con Arduino e il sensore a ultrasuoni e come utilizzare il sensore a ultrasuoni con Arduino.
(2) Parametri:
Alimentazione: +5V DC
Corrente a riposo: <2mA
Corrente di funzionamento: 15mA
Angolo efficace: <15°
Distanza di misurazione: 2cm – 400 cm
Risoluzione: 0.3 cm
Angolo di misurazione: 30 gradi
Larghezza dell’impulso di ingresso trigger: 10uS
(3) Il principio del sensore a ultrasuoni:
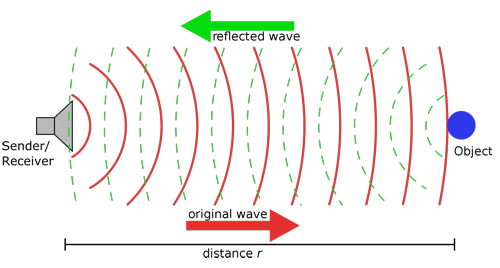
Come mostrato nell’immagine sopra, è come due occhi. Uno è l’estremità trasmittente, l’altro è l’estremità ricevente.
Il modulo a ultrasuoni emetterà le onde ultrasoniche dopo aver ricevuto un segnale di trigger. Quando le onde ultrasoniche incontrano l’oggetto e vengono riflesse indietro, il modulo emette un segnale di eco, quindi può determinare la distanza dell’oggetto dalla differenza di tempo tra il segnale di trigger e il segnale di eco.
Il t è il tempo in cui il segnale emesso incontra l’ostacolo e ritorna. La velocità di propagazione del suono nell’aria è di circa 343m/s, e distanza = velocità * tempo. Tuttavia, l’onda ultrasonica viene emessa e ritorna, il che corrisponde a 2 volte la distanza. Pertanto, è necessario dividere per 2: la distanza misurata dall’onda ultrasonica = (velocità * tempo)/2
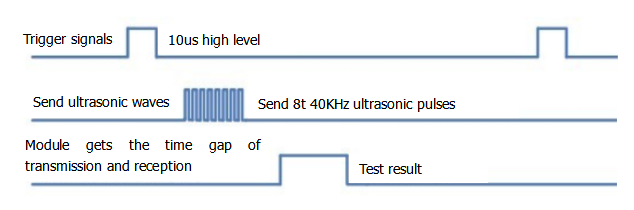
Metodo di utilizzo e diagramma temporale del modulo a ultrasuoni:
Impostare il ritardo del pin Trig di SR04 ad almeno 10μs, il che può attivarlo per rilevare la distanza.
Dopo il trigger, il modulo invierà automaticamente otto impulsi ultrasonici a 40KHz e rileverà se c’è un segnale di ritorno. Questo passaggio verrà completato automaticamente dal modulo.
Se il segnale ritorna, il pin Echo emetterà un livello alto, e la durata del livello alto è il tempo dalla trasmissione dell’onda ultrasonica al suo ritorno.
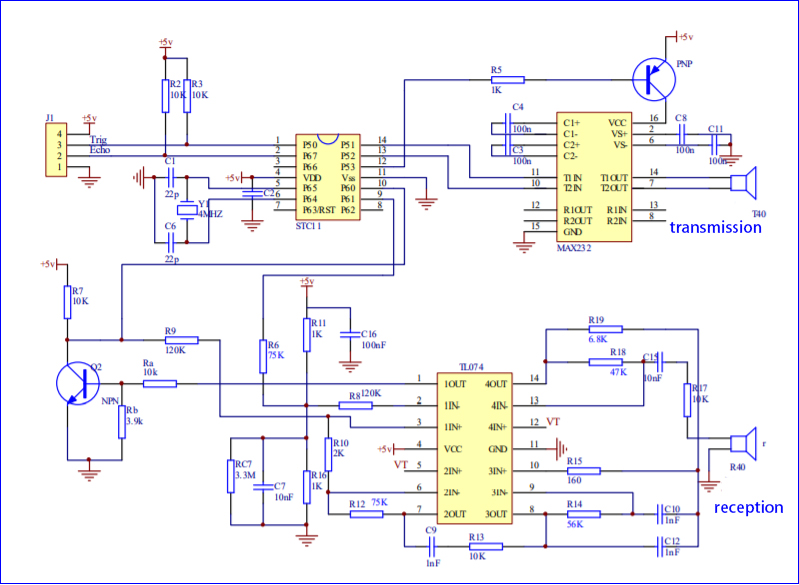
Schema del circuito del sensore a ultrasuoni:
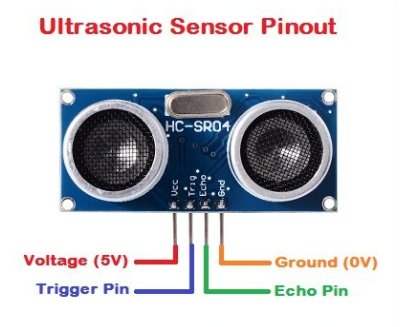
(4) Schema di collegamento:
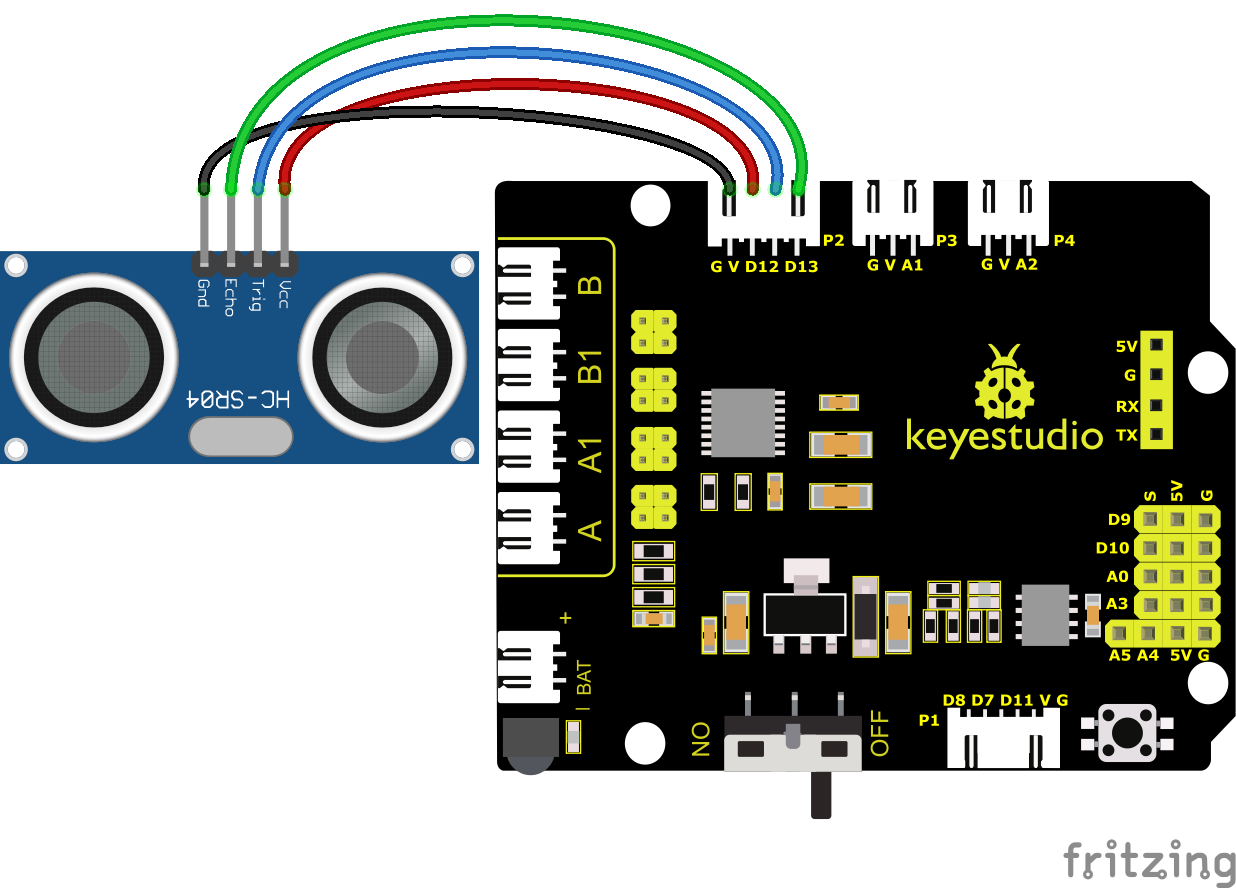
Nota: I pin VCC, Trig, Echo e Gnd del sensore a ultrasuoni sono collegati rispettivamente a 5v(V), 12(S), 13(S) e Gnd(G) dello shield.
(5) Codice di Test:
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anche la comunicazione seriale, e potrebbero esserci conflitti con la comunicazione seriale Bluetooth, che possono causare il fallimento del caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 6.1
Ultrasonic sensor
http://www.keyestudio.com
*/
int trigPin = 12; // Il pin Trig è collegato al 12
int echoPin = 13; // Il pin Echo è collegato al 13
long duration, cm, inches;
void setup()
{
// Avvio della porta seriale
Serial.begin(9600);// Imposta il baud rate a 9600
// Definisce ingresso e uscita
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop()
{
// Fornisce un breve impulso basso per garantire un impulso alto pulito
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);// Fornire almeno 10us di trigger a livello alto
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Il tempo a livello alto è uguale al tempo tra la trasmissione e il ritorno del suono ultrasonico
duration = pulseIn(echoPin, HIGH);
// Converti in distanza
cm = (duration / 2) / 29.1; // converti in centimetri
inches = (duration / 2) / 74; // converti in pollici
// La porta seriale stampa i risultati
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(50);
}
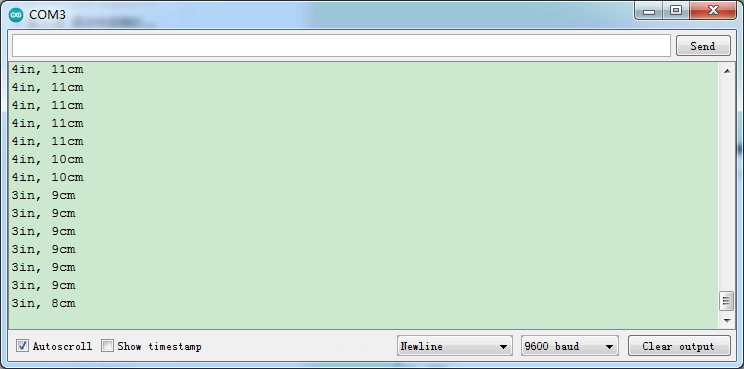
(6) Risultati del Test:
Carica il codice di test sulla scheda di sviluppo, apri il monitor seriale e imposta il baud rate a 9600. La distanza rilevata verrà visualizzata in cm e pollici. Quando ostacoli il sensore a ultrasuoni con la mano, il valore della distanza visualizzata diminuirà.
(7) Spiegazione del Codice:
int trigPin = 12; questo pin è definito per trasmettere onde ultrasoniche, generalmente in uscita.
int echoPin = 13; questo è definito come il pin di ricezione, generalmente in ingresso
cm = (duration/2) / 29.1; inches = (duration/2) / 74; per 0.0135
Possiamo calcolare la distanza utilizzando la seguente formula:
distanza = (tempo di percorrenza/2) x velocità del suono
La velocità del suono è: 343m/s = 0.0343 cm/uS = 1/29.1 cm/uS
Oppure in pollici: 13503.9in/s = 0.0135in/uS = 1/74in/uS
Dobbiamo dividere il tempo di percorrenza per 2 perché dobbiamo tenere conto del fatto che l’onda è stata inviata, ha colpito l’oggetto e poi è tornata al sensore.
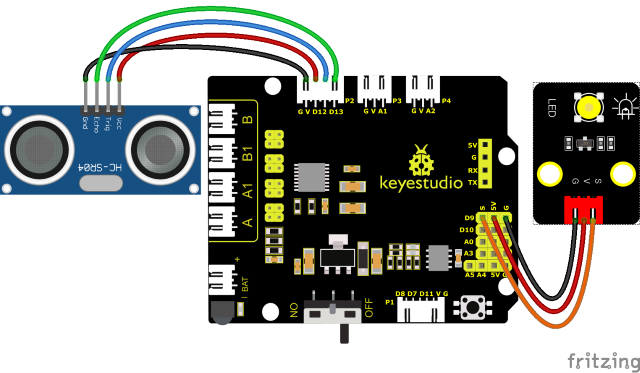
(8) Pratica di Estensione:
Abbiamo appena misurato la distanza visualizzata dagli ultrasuoni. Che ne dici di controllare il LED con la distanza misurata? Proviamo e colleghiamo un modulo LED al pin D9.
Codice di Test
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anche la comunicazione seriale, e potrebbero esserci conflitti con la comunicazione seriale Bluetooth, che possono causare il fallimento del caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 6.2
Ultrasonic LED
http://www.keyestudio.com
*/
int trigPin = 12; // Trig è collegato al 12
int echoPin = 13; // Echo è collegato al 13
int LED = 9;
long duration, cm, inches;
void setup()
{
// avvia la porta seriale
Serial.begin (9600);// imposta il baud rate a 9600
// definisce ingresso e uscita
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(LED, OUTPUT);
}
void loop()
{
// Fornisce un breve impulso basso per garantire un impulso alto pulito
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);// Fornire almeno 10us di trigger a livello alto
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// La durata del livello alto è il tempo dal lancio al ritorno dell'onda ultrasonica
duration = pulseIn(echoPin, HIGH);
// converti in distanza
cm = (duration / 2) / 29.1; // converti in centimetri
inches = (duration / 2) / 74; // converti in pollici
// La porta seriale stampa i risultati
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
if (cm >= 2 && cm <= 10)
{
digitalWrite(LED, HIGH);// accendi il LED
}
else
{
digitalWrite(LED, LOW); // spegni il LED
}
delay(50);
}
Carica il codice di test sulla scheda di sviluppo e blocca il sensore a ultrasuoni con la mano, quindi verifica se il LED è acceso.