Progetto 10: Tank Insegui-Luce
(1)Descrizione:
Nei progetti precedenti, abbiamo introdotto in dettaglio l’uso di vari sensori, moduli e schede di espansione sul robot smart car. Ora passiamo ai progetti del robot smart car. I robot smart car insegui-luce, come suggerisce il nome, sono robot smart car in grado di seguire la luce.
Possiamo combinare le conoscenze acquisite nei progetti sul fotoresistore e sulla guida dei motori per realizzare un robot smart car che insegue la luce. Nel progetto, utilizziamo due moduli fotoresistori per rilevare l’intensità luminosa sui lati sinistro e destro del robot smart car, leggiamo i corrispondenti valori analogici, e quindi controlliamo la rotazione dei due motori in base a questi due dati, così da controllare i movimenti del robot smart car.
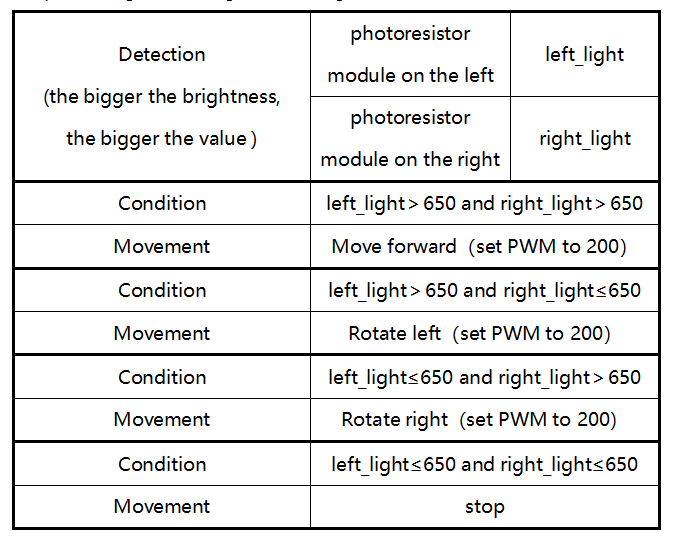
La logica specifica del robot smart car insegui-luce è mostrata di seguito.
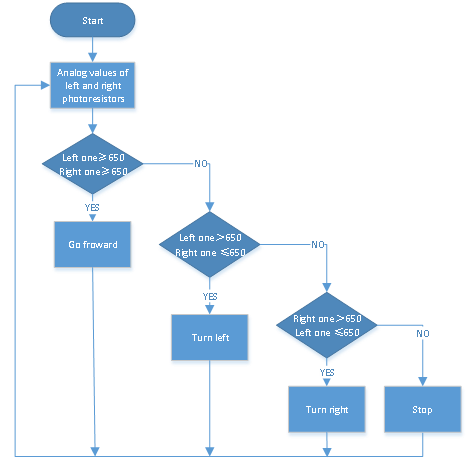
(2)Diagramma di flusso:
(3)Schema di collegamento:
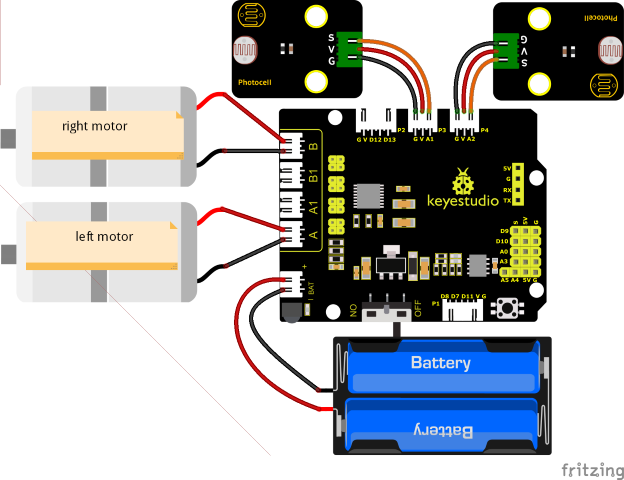
Nota: I pin “G”, “V” e S del modulo fotoresistore sinistro sono collegati rispettivamente a G (GND), V (VCC), A1;
I pin “G”, “V” e S del modulo fotoresistore destro sono collegati rispettivamente a G (GND), V (VCC) e A2.
Il cavo a 4 pin è contrassegnato con A, A1, B1 e B. Il motore posteriore destro è collegato alla porta B della scheda di espansione driver motore 8833 e il motore anteriore sinistro è collegato alla porta A della scheda di espansione driver motore 8833.
(4)Codice di Test:
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anch’esso la comunicazione seriale, e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, che possono causare il fallimento del caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 10
light follow tank
http://www.keyestudio.com
*/
#define light_L_Pin A1 // Definisce il pin del sensore fotosensibile a sinistra
#define light_R_Pin A2 // Definisce il pin del sensore fotosensibile a destra
#define ML_Ctrl 4 // Definisce il pin di controllo della direzione del motore sinistro
#define ML_PWM 6 // Definisce il pin di controllo PWM del motore sinistro
#define MR_Ctrl 2 // Definisce il pin di controllo della direzione del motore destro
#define MR_PWM 5 // Definisce il pin di controllo PWM del motore destro
int left_light;
int right_light;
void setup()
{
Serial.begin(9600);
pinMode(light_L_Pin, INPUT);
pinMode(light_R_Pin, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
}
void loop()
{
left_light = analogRead(light_L_Pin);
right_light = analogRead(light_R_Pin);
Serial.print("left_light_value = ");
Serial.println(left_light);
Serial.print("right_light_value = ");
Serial.println(right_light);
if (left_light > 650 && right_light > 650) // vai avanti
{
Car_front();
}
else if (left_light > 650 && right_light <= 650) // gira a sinistra
{
Car_left();
}
else if (left_light <= 650 && right_light > 650) // gira a destra
{
Car_right();
}
else // altrimenti, fermati
{
Car_Stop();
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
(5)Risultato del Test
Dopo aver caricato con successo il codice di test, collegato secondo lo schema di cablaggio, spostato il selettore DIP verso destra e alimentato il dispositivo, il robot smart car si muove seguendo la luce.