Progetto 15: Carro Armato con Telecomando IR
(1)Descrizione:
Il telecomando a infrarossi è uno dei sistemi di controllo remoto più comuni, utilizzato in motori elettrici, ventilatori elettrici e molti altri elettrodomestici. In questo progetto, utilizziamo le conoscenze apprese in precedenza per realizzare un’auto intelligente controllata a infrarossi.
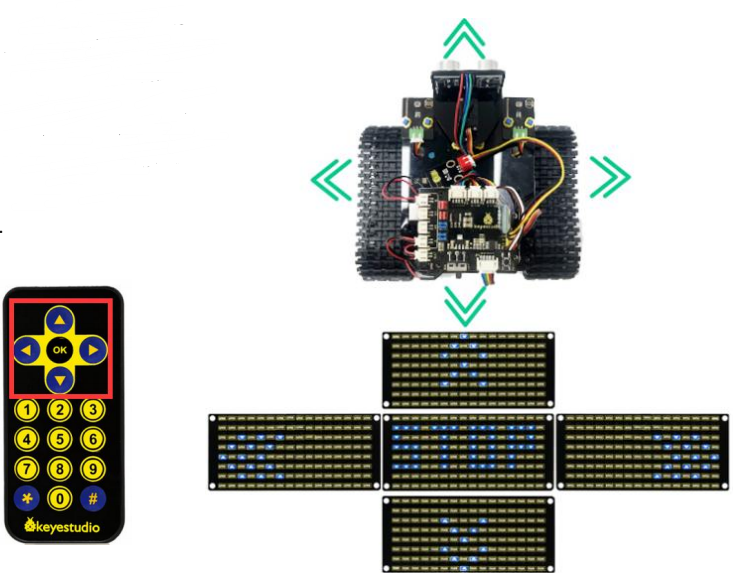
Nella 9ª lezione, abbiamo testato il valore del tasto corrispondente a ciascun pulsante del telecomando a infrarossi. In questo progetto, possiamo impostare il codice (valore del tasto) per fare in modo che il pulsante corrispondente controlli i movimenti dell’auto intelligente e visualizzi i pattern di movimento sulla matrice LED 8X16.
La logica specifica dell’auto intelligente con telecomando a infrarossi è mostrata nella tabella:
Tasto ultrasonico |
Valore tasto |
Istruzioni dai tasti |
|---|---|---|
|
FF629D |
Avanza(impostare PWM a 200) |
|
FFA857 |
Vai indietro(impostare PWM a 200) |
|
FF22DD |
Gira a sinistra |
|
FFC23D |
Gira a destra |
|
FF02FD |
Ferma |





Impostazione iniziale: la matrice LED 8X16 mostra il pattern “ ”.
”.
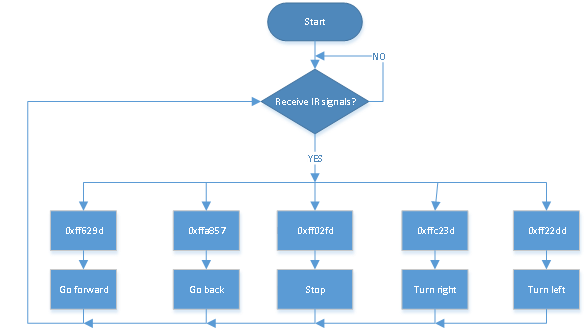
(2)Diagramma di flusso:
(3)Schema di collegamento:
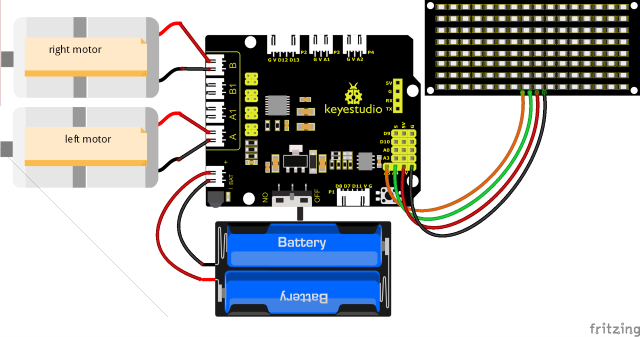
Nota:
GND, VCC, SDA e SCL del pannello LED 8x16 sono collegati a G(GND), V(VCC), SDA e SCL della scheda di espansione.
Poiché la scheda 8833 integra il ricevitore IR, non è necessario collegarlo. I pin del ricevitore IR sono G(GND), V(VCC) e D3.
(4)Codice di Test:
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anche la comunicazione seriale, e potrebbero esserci conflitti con la comunicazione seriale Bluetooth, causando il fallimento del caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 15
IRremote Control Tank
http://www.keyestudio.com
*/
#include <IRremote.h>
IRrecv irrecv(3); //
decode_results results;
long ir_rec; // Utilizzato per memorizzare i valori infrarossi ricevuti
// Array, utilizzato per salvare i dati delle immagini, può essere calcolato manualmente o ottenuto dallo strumento di modulo
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 // Imposta il pin del clock come A5
#define SDA_Pin A4 // Imposta il pin dei dati come A4
#define ML_Ctrl 4 // Definisce il pin di controllo della direzione del motore sinistro
#define ML_PWM 6 // Definisce il pin di controllo PWM del motore sinistro
#define MR_Ctrl 2 // Definisce il pin di controllo della direzione del motore destro
#define MR_PWM 5 // Definisce il pin di controllo PWM del motore destro
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Inizializza la libreria del ricevitore a infrarossi
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
matrix_display(clear); // pulisce lo schermo
matrix_display(start01); // mostra l'immagine di avvio
}
void loop()
{
if (irrecv.decode(&results)) // Riceve il valore del telecomando a infrarossi
{
ir_rec = results.value;
String type = "UNKNOWN";
String typelist[14] = {"UNKNOWN", "NEC", "SONY", "RC5", "RC6", "DISH", "SHARP", "PANASONIC", "JVC", "SANYO", "MITSUBISHI", "SAMSUNG", "LG", "WHYNTER"};
if (results.decode_type >= 1 && results.decode_type <= 13)
{
type = typelist[results.decode_type];
}
Serial.print("IR TYPE:" + type + " ");
Serial.println(ir_rec, HEX);
irrecv.resume();
}
switch (ir_rec)
{
case 0xFF629D: Car_front(); break; // comando per andare avanti
case 0xFFA857: Car_back(); break; // comando per andare indietro
case 0xFF22DD: Car_T_left(); break; // comando per girare a sinistra
case 0xFFC23D: Car_T_right(); break; // comando per girare a destra
case 0xFF02FD: Car_Stop(); break; // comando per fermarsi
case 0xFF30CF: Car_left(); break; // comando per ruotare a sinistra
case 0xFF7A85: Car_right(); break; // comando per ruotare a destra
default: break;
}
}
/***************Funzione per azionare il motore***************/
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
matrix_display(back); // Vai indietro
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
matrix_display(front); // mostra l'immagine per andare avanti
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
matrix_display(left); // mostra l'immagine per girare a sinistra
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
matrix_display(right); // mostra l'immagine per girare a destra
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
matrix_display(STOP01); // mostra l'immagine per fermarsi
}
void Car_T_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 100);
matrix_display(left); // mostra l'immagine per girare a sinistra
}
void Car_T_right()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 100);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 0);
matrix_display(right); // mostra l'immagine per girare a destra
}
// Questa funzione viene utilizzata per la visualizzazione sulla matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); // Funzione per richiamare la condizione di inizio trasmissione dati
IIC_send(0xc0); // Scegli un indirizzo
for (int i = 0; i < 16; i++) // I dati del pattern hanno 16 byte
{
IIC_send(matrix_value[i]); // trasferisce i dati del pattern
}
IIC_end(); // Termina il trasferimento dei dati del pattern
IIC_start();
IIC_send(0x8A); // controllo del display, seleziona la larghezza di impulso come 4/16
IIC_end();
}
// Condizioni per l'inizio del trasferimento dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
// Il segno della fine della trasmissione dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
// trasferisce i dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) // ogni carattere ha 8 cifre, rilevate una per una
{
if (send_data & mask) // imposta livelli alti o bassi in base a ogni bit (0 o 1)
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); // Porta il pin del clock SCL_Pin alto per interrompere la trasmissione dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); // Abbassa il pin del clock SCL_Pin per cambiare i segnali di SDA
}
}
(5)Risultato del Test:
Dopo aver caricato il codice, attivare l’interruttore di alimentazione dello shield del motore. Posizionare il robot sul pavimento, fare riferimento alla tabella sopra e premere i diversi pulsanti: il robot si muoverà nella direzione preimpostata corrispondente.