Progetto 12: Tank con Evitamento Ostacoli a Ultrasuoni

(1)Descrizione:
Nel progetto precedente, abbiamo realizzato un’auto intelligente che segue i movimenti utilizzando ultrasuoni. In realtà, utilizzando gli stessi componenti e lo stesso schema di collegamento, è sufficiente modificare il codice di test per trasformarla in un’auto intelligente che evita gli ostacoli con ultrasuoni. Questa auto intelligente può muoversi seguendo il movimento delle mani umane.
Utilizziamo i sensori a ultrasuoni per rilevare la distanza tra l’auto intelligente e l’ostacolo di fronte, e quindi controlliamo la rotazione dei due motori in base a questi dati per controllare i movimenti dell’auto intelligente.
Rilevamento |
|
|---|---|
Distanza misurata dal sensore a ultrasuoni tra l’auto e l’ostacolo di fronte |
a(cm) |
Distanza misurata dal sensore a ultrasuoni tra l’auto e l’ostacolo a destra |
a2(cm) |
Distanza misurata dal sensore a ultrasuoni tra l’auto e l’ostacolo a sinistra |
a1(cm) |
Impostazione: impostare l’angolo iniziale del servo a 90° |
Condizione 1 |
Condizione 2 |
Condizione 3 |
Movimento |
|---|---|---|---|
a<20 |
Stop per 500ms; |
||
a1<50 |
Confrontare a1 con a2 |
||
a1>a2 |
Impostare l’angolo del servo a 90°, ruotare a sinistra per 700ms (impostare PWM a 255) |
||
a1<a2 |
Impostare l’angolo del servo a 90°, ruotare a destra per 700ms (impostare PWM a 255) |
||
Condizione 1 |
Condizione 2 |
Movimento |
|
a<20 |
a1≥50 |
Casuale |
impostare l’angolo del servo a 90°, ruotare a sinistra per 500ms (impostare PWM a 255) |
Condizione |
Movimento |
||
a≥20 |
avanzare (impostare PWM a 100) |
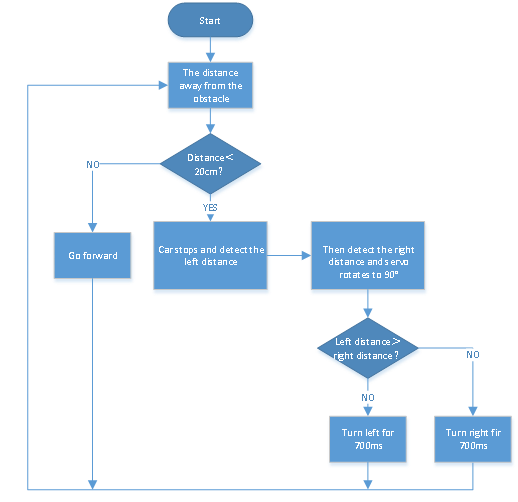
(2)Diagramma di flusso:
(3)Schema di collegamento:
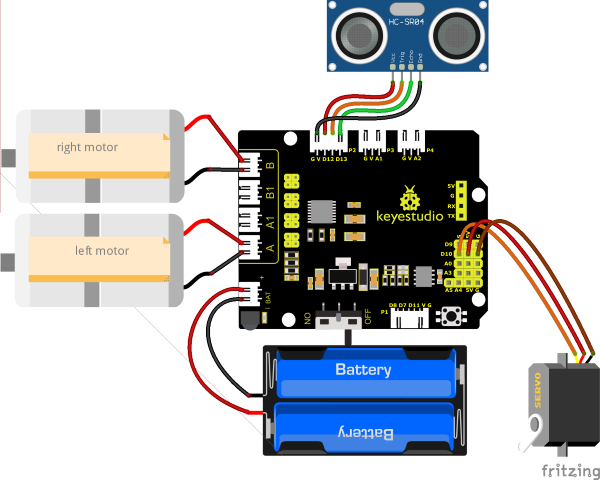
(Nota: i fili marrone, rosso e arancione del servo sono collegati rispettivamente a G (GND), V(5V)e D10 della scheda di espansione;e per il sensore a ultrasuoni, il pin VCC è collegato a 5v (V), il pin Trig al digitale 12 (S), il pin Echo al digitale 13 (S), e il pin Gnd a Gnd (G); come nel progetto precedente.)
(4)Codice di Test:
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anch’esso la comunicazione seriale, e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, che possono causare il fallimento del caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 12
Ultrasonic avoid tank
http://www.keyestudio.com
*/
#define servoPin 10 //Il pin del servo
int a, a1, a2;
#define ML_Ctrl 4 //Definisce il pin di controllo della direzione del motore sinistro
#define ML_PWM 6 //Definisce il pin di controllo PWM del motore sinistro
#define MR_Ctrl 2 //Definisce il pin di controllo della direzione del motore destro
#define MR_PWM 5 //Definisce il pin di controllo PWM del motore destro
#define Trig 12
#define Echo 13
float distance;
void setup()
{
Serial.begin(9600);
pinMode(servoPin, OUTPUT);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
procedure(90); //Imposta l'angolo del servo a 90°
delay(500); //ritardo di 500ms
}
void loop()
{
a = checkdistance(); //Assegna la distanza frontale rilevata dal sensore a ultrasuoni alla variabile a
if (a < 20) //Quando la distanza frontale è inferiore a 20cm
{
Car_Stop(); //Il robot si ferma
delay(500); //ritardo di 500ms
procedure(180); //Il supporto pan-tilt a ultrasuoni gira a sinistra
delay(500); //ritardo di 500ms
a1 = checkdistance(); //Assegna la distanza a sinistra rilevata dal sensore a ultrasuoni alla variabile a1
delay(100); //leggi il valore
procedure(0); //Il supporto pan-tilt a ultrasuoni gira a destra
delay(500); //ritardo di 500ms
a2 = checkdistance(); //Assegna la distanza a destra rilevata dal sensore a ultrasuoni alla variabile a2
delay(100); //leggi il valore
procedure(90); //Torna a 90°
delay(500);
if (a1 > a2)
{ //Quando la distanza a sinistra è maggiore di quella a destra
Car_left(); //Il robot gira a sinistra
delay(700); //gira a sinistra per 700ms
}
else
{
Car_right(); //Gira a destra per 700ms
delay(700);
}
}
else//Quando la distanza frontale è >=20cm,il robot avanza
{
Car_front(); //vai avanti
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
//La funzione controlla i servo
void procedure(byte myangle)
{
int pulsewidth;
for (int i = 0; i < 5; i++)
{
pulsewidth = myangle * 11 + 500; //Calcola il valore della larghezza dell'impulso
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulsewidth); //Il tempo in livello alto rappresenta la larghezza dell'impulso
digitalWrite(servoPin, LOW);
delay((20 - pulsewidth / 1000)); //Poiché il ciclo è di 20ms, il tempo rimanente è in livello basso
}
}
//La funzione controlla gli ultrasuoni
float checkdistance()
{
float distance;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
distance = pulseIn(Echo, HIGH) / 58.20; //Il 58.20 deriva da 2*29.1=58.2
delay(10);
return distance;
}
(5)Risultato del Test:
Dopo aver caricato con successo il codice di test, collegato i cavi, spostato il selettore DIP sull’estremità ON e alimentato il sistema, l’auto intelligente avanza e schiva automaticamente gli ostacoli.