Progetto 19: Robot Carro Armato Ultrasonico - Funzioni Multiple
(1)Descrizione:
Il robot auto intelligente ha eseguito una singola funzione in ogni progetto precedente.
Può mostrare più funzioni contemporaneamente? Sì.
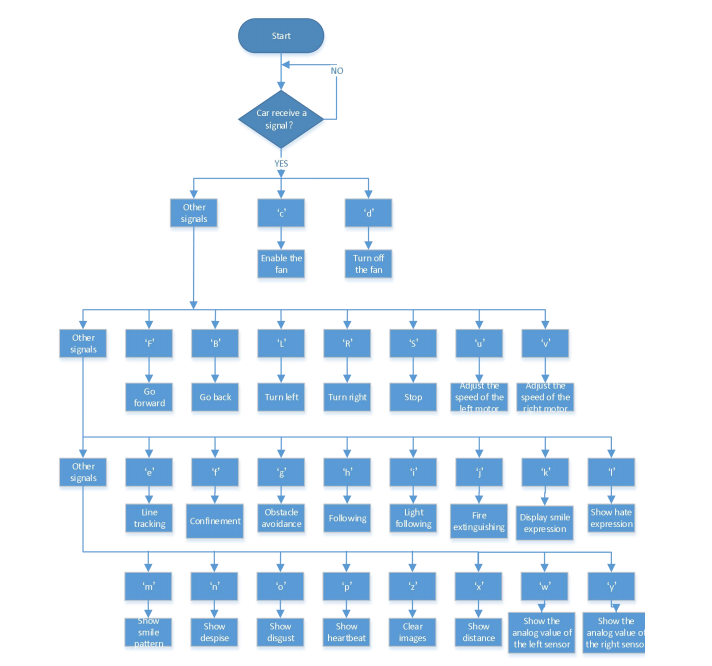
In quest’ultimo grande progetto, intendiamo utilizzare un codice completo per controllare il robot auto intelligente e mostrare tutte le funzioni menzionate nei progetti precedenti. Utilizziamo i tasti sull’APP Bluetooth per passare automaticamente da una funzione all’altra, in modo molto semplice e conveniente.
(2)Diagramma di Flusso:
(3)Schema di Collegamento:
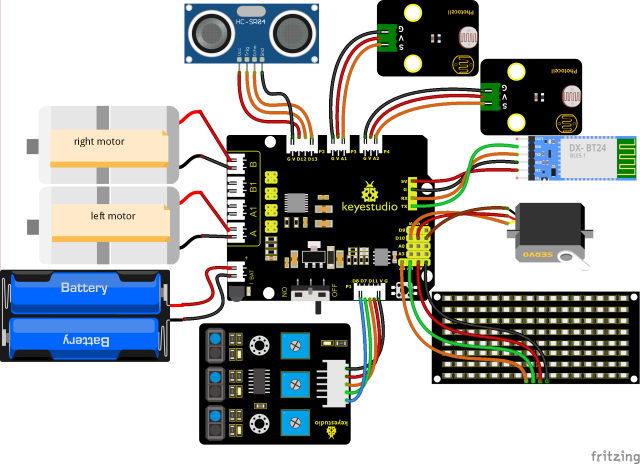
1. GND, VCC, SDA e SCL della scheda 8x16 sono collegati a G (GND), + (VCC), A4 e A5 della scheda di espansione.
2. VCC, Trig, Echo e Gnd del sensore ultrasonico sono collegati a 5V (V), 12 (S), 13 (S) e Gnd (G).
3. Il filo marrone, il filo rosso e il filo arancione del servo sono collegati a Gnd (G), 5v (V) e D10.
4. RXD, TXD, GND e VCC del modulo BT sono collegati a TX, RX, G (GND) e 5V (VCC). STATE e BRK non necessitano di essere collegati.
5. I pin “G”, “V” e S del modulo fotoresistore sinistro sono collegati rispettivamente a G (GND), V (VCC) e A1; Il modulo fotoresistore destro è collegato rispettivamente a G (GND), V (VCC) e A2.
6. Le porte distali del sensore di rilevamento della linea sono 11, 7 e 8.
(4)Codice di Test:
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, poiché il caricamento del codice utilizza anche la comunicazione seriale e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, causando un errore nel caricamento.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 19
Ultrasonic Tank Robot Multiple Functions
http://www.keyestudio.com
*/
#include <IRremote.h>
IRrecv irrecv(3); //
decode_results results;
long ir_rec; // utilizzato per salvare il valore IR
/***********/
#define USE_FAN_FUNCTION 0
// Array, utilizzato per salvare i dati delle immagini, può essere calcolato manualmente o ottenuto dallo strumento di modulazione
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char Smile[] = {0x00, 0x00, 0x1c, 0x02, 0x02, 0x02, 0x5c, 0x40, 0x40, 0x5c, 0x02, 0x02, 0x02, 0x1c, 0x00, 0x00};
unsigned char Disgust[] = {0x00, 0x00, 0x02, 0x02, 0x02, 0x12, 0x08, 0x04, 0x08, 0x12, 0x22, 0x02, 0x02, 0x00, 0x00, 0x00};
unsigned char Happy[] = {0x02, 0x02, 0x02, 0x02, 0x08, 0x18, 0x28, 0x48, 0x28, 0x18, 0x08, 0x02, 0x02, 0x02, 0x02, 0x00};
unsigned char Squint[] = {0x00, 0x00, 0x00, 0x41, 0x22, 0x14, 0x48, 0x40, 0x40, 0x48, 0x14, 0x22, 0x41, 0x00, 0x00, 0x00};
unsigned char Despise[] = {0x00, 0x00, 0x06, 0x04, 0x04, 0x04, 0x24, 0x20, 0x20, 0x26, 0x04, 0x04, 0x04, 0x04, 0x00, 0x00};
unsigned char Heart[] = {0x00, 0x00, 0x0C, 0x1E, 0x3F, 0x7F, 0xFE, 0xFC, 0xFE, 0x7F, 0x3F, 0x1E, 0x0C, 0x00, 0x00, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 // imposta il pin del clock su A5
#define SDA_Pin A4 // imposta il pin dei dati su A4
#define ML_Ctrl 4 // definisce il pin di controllo della direzione del motore sinistro come 4
#define ML_PWM 6 // definisce il pin di controllo PWM del motore sinistro
#define MR_Ctrl 2 // definisce il pin di controllo della direzione del sensore destro
#define MR_PWM 5 // definisce il pin di controllo PWM del motore destro
char ble_val; // utilizzato per salvare il valore Bluetooth
byte speeds_L = 200; // la velocità iniziale del motore sinistro è 200
byte speeds_R = 200; // la velocità iniziale del motore destro è 200
String speeds_l, speeds_r; // riceve i caratteri PWM e li converte in valore PWM
// collegamento del sensore di rilevamento della linea
#define L_pin 11 // sinistra
#define M_pin 7 // centro
#define R_pin 8 // destra
int L_val, M_val, R_val;
#if USE_FAN_FUNCTION /****usa la ventola*******/
int flame_L = A1; // definisce la porta analogica del sensore di fiamma sinistro su A1
int flame_R = A2; // definisce la porta analogica del sensore di fiamma destro su A2
int flame_valL, flame_valR;
// il pin del motore 130
int INA = 12;
int INB = 13;
#else /****usa il sensore ultrasonico*******/
#define servoPin 10 // pin del servo
#define light_L_Pin A1 // definisce il pin del fotoresistore sinistro
#define light_R_Pin A2 // definisce il pin del fotoresistore destro
int left_light;
int right_light;
#define Trig 12
#define Echo 13
float distance;// Memorizza i valori di distanza rilevati dall'ultrasonico per il seguimento
// Memorizza i valori di distanza rilevati dall'ultrasonico per l'evitamento degli ostacoli
int a;
int a1;
int a2;
#endif
bool flag; // variabile flag, utilizzata per entrare e uscire da una modalità
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Inizializza la libreria del telecomando IR
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
pinMode(L_pin, INPUT); // definisce i pin dei sensori come INPUT
pinMode(M_pin, INPUT);
pinMode(R_pin, INPUT);
matrix_display(clear); // schermo pulito
matrix_display(start01); // mostra l'avvio
#if USE_FAN_FUNCTION/****usa la ventola*******/
pinMode(INA, OUTPUT);// imposta INA come OUTPUT
pinMode(INB, OUTPUT);// imposta INB come OUTPUT
// definisce gli ingressi del sensore di fiamma
pinMode(flame_L, INPUT);
pinMode(flame_R, INPUT);
#else/****usa il sensore ultrasonico*******/
pinMode(servoPin, OUTPUT);
pinMode(light_L_Pin, INPUT);
pinMode(light_R_Pin, INPUT);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
procedure(90); // imposta l'angolo del servo a 90°
#endif
}
void loop()
{
if (Serial.available()) // se ci sono dati nel buffer seriale
{
ble_val = Serial.read();
Serial.println(ble_val);
switch (ble_val)
{
case 'F': Car_front(); break; // il comando per andare avanti
case 'B': Car_back(); break; // il comando per andare indietro
case 'L': Car_left(); break; // il comando per girare a sinistra
case 'R': Car_right(); break; // il comando per girare a destra
case 'S': Car_Stop(); break; // fermati
case 'e': Tracking(); break; // entra nella modalità di rilevamento della linea
case 'f': Confinement(); break; // entra nella modalità di confinamento
#if USE_FAN_FUNCTION/****usa la ventola*******/
case 'j': Fire(); break; // abilita la modalità estinzione incendi
case 'c': fan_begin(); break; // abilita la ventola
case 'd': fan_stop(); break; // spegni la ventola
#else/****usa il sensore ultrasonico*******/
case 'g': Avoid(); break; // entra nella modalità evitamento ostacoli
case 'h': Follow(); break; // entra nella modalità seguimento
case 'i': Light_following(); break; // entra nella modalità seguimento della luce
#endif
case 'u':
speeds_l = Serial.readStringUntil('#');
speeds_L = String(speeds_l).toInt();
break; // inizia ricevendo u, termina ricevendo il carattere # e converte in intero
case 'v':
speeds_r = Serial.readStringUntil('#');
speeds_R = String(speeds_r).toInt();
break; // inizia ricevendo u, termina ricevendo il carattere # e converte in intero
case 'k': matrix_display(Smile); break; // mostra il volto "sorridente"
case 'l': matrix_display(Disgust); break; // mostra il volto "disgustato"
case 'm': matrix_display(Happy); break; // mostra il volto "felice"
case 'n': matrix_display(Squint); break; // mostra il volto "triste"
case 'o': matrix_display(Despise); break; // mostra il volto "disprezzo"
case 'p': matrix_display(Heart); break; // mostra l'immagine del battito cardiaco
case 'z': matrix_display(clear); break; // cancella le immagini
default: break;
}
}
#if (USE_FAN_FUNCTION != 1)/****la funzione per non usare la ventola*******/
// I seguenti tre segnali sono utilizzati principalmente per la stampa ciclica
if (ble_val == 'x')
{
distance = checkdistance(); Serial.println(distance);
delay(50);
}
else if (ble_val == 'w')
{
left_light = analogRead(light_L_Pin);
Serial.println(left_light);
delay(50);
}
else if (ble_val == 'y')
{
right_light = analogRead(light_R_Pin);
Serial.println(right_light);
delay(50);
}
#endif
if (irrecv.decode(&results)) // Riceve il valore del telecomando infrarosso
{
ir_rec = results.value;
Serial.println(ir_rec, HEX);
switch (ir_rec)
{
case 0xFF629D: Car_front(); break; // vai avanti
case 0xFFA857: Car_back(); break; // vai indietro
case 0xFF22DD: Car_left(); break; // ruota a sinistra
case 0xFFC23D: Car_right(); break; // ruota a destra
case 0xFF02FD: Car_Stop(); break; // fermati
default: break;
}
irrecv.resume();
}
}
#if (USE_FAN_FUNCTION != 1)/****usa il sensore ultrasonico*******/
// Controlla il sensore ultrasonico
float checkdistance()
{
float distance;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
distance = pulseIn(Echo, HIGH) / 58.20; //
delay(10);
return distance;
}
// la funzione per controllare il servo
void procedure(int myangle)
{
int pulsewidth;
pulsewidth = map(myangle, 0, 180, 500, 2000); // Calcola il valore della larghezza dell'impulso, che dovrebbe essere il valore mappato da 500 a 2500. Considerando l'influenza della libreria infrarossi, viene utilizzato 500~2000.
for (int i = 0; i < 5; i++)
{
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulsewidth); // La durata del livello alto è la larghezza dell'impulso
digitalWrite(servoPin, LOW);
delay((20 - pulsewidth / 1000)); // Il periodo è 20ms, quindi il livello basso dura il resto del tempo
}
}
/*****************evitamento ostacoli******************/
void Avoid()
{
flag = 0;
while (flag == 0)
{
a = checkdistance(); // la distanza frontale è impostata su a
if (a < 20) // Quando la distanza frontale è inferiore a 20cm
{
Car_Stop(); // fermati
delay(500); // ritardo di 500ms
procedure(180); // il servo gira a sinistra
delay(500); // ritardo di 500ms
a1 = checkdistance(); // la distanza sinistra è impostata su a1
delay(100); // leggi il valore
procedure(0); // il servo gira a destra
delay(500); // ritardo di 500ms
a2 = checkdistance(); // la distanza destra è impostata su a2
delay(100); // leggi il valore
procedure(90); // torna a 90°
delay(500);
if (a1 > a2) // Quando la distanza a sinistra è maggiore della distanza a destra
{
Car_left(); // il robot gira a sinistra
delay(700); // gira a sinistra per 700ms
}
else
{
Car_right(); // gira a destra
delay(700);
}
}
else // se la distanza frontale è ≥20cm, il robot va avanti
{
Car_front(); // vai avanti
}
// riceve il valore Bluetooth per uscire dal loop
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S') // riceve S
{
flag = 1; // imposta flag a 1 per uscire dal loop
Car_Stop();
}
}
}
}
/*******************seguimento***************/
void Follow()
{
flag = 0;
while (flag == 0)
{
distance = checkdistance(); // imposta il valore della distanza su distance
if (distance >= 20 && distance <= 60) // vai avanti
{
Car_front();
}
else if (distance > 10 && distance < 20) // fermati
{
Car_Stop();
}
else if (distance <= 10) // vai indietro
{
Car_back();
}
else // fermati
{
Car_Stop();
}
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S')
{
flag = 1; // esci dal loop
Car_Stop();
}
}
}
}
/****************seguimento della luce******************/
void Light_following()
{
flag = 0;
while (flag == 0)
{
left_light = analogRead(light_L_Pin);
right_light = analogRead(light_R_Pin);
if (left_light > 650 && right_light > 650) // vai avanti
{
Car_front();
}
else if (left_light > 650 && right_light <= 650) // gira a sinistra
{
Car_left();
}
else if (left_light <= 650 && right_light > 650) // gira a destra
{
Car_right();
}
else // altrimenti, fermati
{
Car_Stop();
}
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S')
{
flag = 1;
Car_Stop();
}
}
}
}
#else/****usa la ventola*******/
/***************abilita la ventola*****************/
void fan_begin()
{
digitalWrite(INA, LOW);
digitalWrite(INB, HIGH);
}
/***************ferma la ventola*****************/
void fan_stop()
{
digitalWrite(INA, LOW);
digitalWrite(INB, LOW);
}
/***************estingui l'incendio****************/
void Fire()
{
flag = 0;
while (flag == 0)
{
// Leggi il valore analogico del sensore di fiamma
flame_valL = analogRead(flame_L);
flame_valR = analogRead(flame_R);
if (flame_valL <= 700 || flame_valR <= 700)
{
Car_Stop();
fan_begin();
}
else
{
fan_stop();
L_val = digitalRead(L_pin); // Leggi il valore del sensore sinistro
M_val = digitalRead(M_pin); // Leggi il valore del sensore sinistro
R_val = digitalRead(R_pin); // Leggi il valore del sensore destro
if (M_val == 1) //quello centrale rileva le linee nere
{
if (L_val == 1 && R_val == 0) //Se viene rilevata una linea nera a sinistra, ma non a destra, girare a sinistra
{
Car_left();
}
else if (L_val == 0 && R_val == 1) //Se viene rilevata una linea nera a destra, non a sinistra, girare a destra
{
Car_right();
}
else //vai avanti
{
Car_front();
}
}
else //quello centrale rileva le linee nere
{
if (L_val == 1 && R_val == 0) //Se viene rilevata una linea nera a sinistra, ma non a destra, girare a sinistra
{
Car_left();
}
else if (L_val == 0 && R_val == 1) //Se viene rilevata una linea nera a destra, non a sinistra, girare a destra
{
Car_right();
}
else //altrimenti fermarsi
{
Car_Stop();
}
}
}
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S')
{
flag = 1;
Car_Stop();
}
}
}
}
#endif
/***************inseguimento linea*****************/
void Tracking()
{
flag = 0;
while (flag == 0)
{
L_val = digitalRead(L_pin); //Leggi il valore del sensore sinistro
M_val = digitalRead(M_pin); //Leggi il valore del sensore intermedio
R_val = digitalRead(R_pin); //Leggi il valore del sensore destro
if (M_val == 1) //quello centrale rileva le linee nere
{
if (L_val == 1 && R_val == 0) //Se viene rilevata una linea nera a sinistra, ma non a destra, girare a sinistra
{
Car_left();
}
else if (L_val == 0 && R_val == 1) //Se viene rilevata una linea nera a destra, non a sinistra, girare a destra
{
Car_right();
}
else //vai avanti
{
Car_front();
}
}
else //il sensore centrale non rileva linee nere
{
if (L_val == 1 && R_val == 0) //Se viene rilevata una linea nera a sinistra, ma non a destra, girare a sinistra
{
Car_left();
}
else if (L_val == 0 && R_val == 1) //Se viene rilevata una linea nera a destra, non a sinistra, girare a destra
{
Car_right();
}
else //altrimenti fermarsi
{
Car_Stop();
}
}
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S')
{
flag = 1;
Car_Stop();
}
}
}
}
/***************Confinamento*****************/
void Confinement()
{
flag = 0;
while (flag == 0)
{
L_val = digitalRead(L_pin); //Leggi il valore del sensore sinistro
M_val = digitalRead(M_pin); //Leggi il valore del sensore intermedio
R_val = digitalRead(R_pin); //Leggi il valore del sensore destro
if ( L_val == 0 && M_val == 0 && R_val == 0 ) //Vai avanti quando non vengono rilevate linee nere
{
Car_front();
}
else
{
Car_back();
delay(700);
Car_left();
delay(800);
}
if (Serial.available())
{
ble_val = Serial.read();
if (ble_val == 'S')
{
flag = 1;
Car_Stop();
}
}
}
}
/***************matrice di punti******************/
//questa funzione viene utilizzata per la visualizzazione della matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //usa la funzione per avviare la trasmissione dei dati
IIC_send(0xc0); //seleziona un indirizzo
for (int i = 0; i < 16; i++) //i dati dell'immagine hanno 16 caratteri
{
IIC_send(matrix_value[i]); //dati per trasmettere immagini
}
IIC_end(); //termina la trasmissione dei dati delle immagini
IIC_start();
IIC_send(0x8A); //mostra il controllo e seleziona la larghezza del impulso 4/16
IIC_end();
}
//la condizione in cui i dati iniziano a trasmettere
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//trasmetti dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //ogni carattere ha 8 cifre, che vengono rilevate una per una
{
if (send_data & mask) //imposta livelli alti o bassi in base a ciascun bit (0 o 1)
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //alza il pin del clock SCL_Pin per terminare la trasmissione dei dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //abbassa il pin del clock SCL_Pin per cambiare i segnali di SDA
}
}
//il segnale che la trasmissione dei dati è terminata
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
/***************motore in funzione****************/
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, speeds_R);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, speeds_L);
matrix_display(back); //mostra l'immagine di marcia indietro
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 255 - speeds_R);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 255 - speeds_L);
matrix_display(front); //mostra l'immagine di marcia in avanti
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 255 - speeds_R);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, speeds_L);
matrix_display(left); //mostra l'immagine di svolta a sinistra
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, speeds_R);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 255 - speeds_L);
matrix_display(right); //mostra l'immagine di svolta a destra
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
matrix_display(STOP01); //mostra l'immagine di stop
}
(5)Risultato del Test:
Prima di caricare il codice del programma, il modulo Bluetooth deve essere rimosso; altrimenti il caricamento del codice fallirà.
Dopo aver caricato il codice con successo, attiva i servizi di localizzazione sul tuo dispositivo, quindi connetti il modulo Bluetooth.
Una volta che il modulo Bluetooth è collegato e alimentato, e l’APP mobile è connessa con successo al Bluetooth, possiamo utilizzare l’APP mobile per controllare il robot cingolato.
Puoi anche controllare il robot con il telecomando.