Progetto 17: Tank Controllato via Bluetooth
(1)Descrizione:
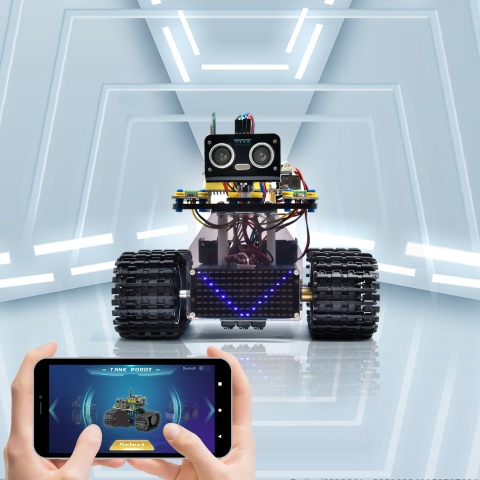
Abbiamo imparato le nozioni di base del Bluetooth nel progetto precedente. In questa lezione, utilizzeremo il Bluetooth per controllare il robot. Poiché coinvolge il Bluetooth, sono necessari un mittente e un ricevitore. Nel progetto, utilizziamo il telefono cellulare come mittente (master) e il robot connesso con il modulo Bluetooth HM-10 (slave) come ricevitore.
Abbiamo imparato in precedenza che l’invio di un bit può controllare i LED. Il principio per controllare questo robot è lo stesso.
Prima di tutto capiamo la funzione di ogni pulsante sull’APP, poi utilizziamo i pulsanti dell’APP per controllare il tank.
(2)Funzioni Principali dei Tasti sull’APP
La tabella seguente illustra le funzioni dei tasti corrispondenti:
TASTI |
FUNZIONI |
|---|---|
|
Accoppia e connette il modulo Bluetooth HM-10; clicca di nuovo per disconnettere |
|
seleziona il robot da controllare |
|
per controllare i movimenti del robot tramite pulsanti |
|
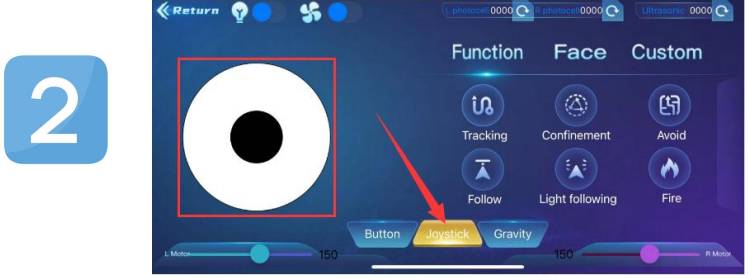
Per controllare i movimenti del robot tramite joystick |
|
Per controllare i movimenti del robot tramite gravità |
|
Invia “F” quando premuto e “S” quando rilasciato |
|
Invia “L” quando premuto e “S” quando rilasciato |
|
Invia “R” quando premuto e “S” quando rilasciato |
|
Invia “B” quando premuto e “S” quando rilasciato |
|
Invia “u”+cifra+“#” quando trascinato |
|
Invia “v”+cifra+“#” quando trascinato |
|
Seleziona per entrare nella pagina Funzioni |
|
Invia “G” quando premuto e “S” quando premuto di nuovo |
|
Invia “h” quando premuto e “S” quando premuto di nuovo |
|
Invia “e” quando premuto e “S” quando premuto di nuovo |
|
Invia “f” quando premuto e “S” quando premuto di nuovo |
|
Invia “i” quando premuto e “S” quando premuto di nuovo |
|
Invia “j” quando premuto e “S” quando premuto di nuovo |
|
Seleziona per entrare nella modalità di visualizzazione delle espressioni facciali |
|
Invia “k” quando premuto e “z” quando premuto di nuovo |
|
Invia “l” quando premuto e “z” quando premuto di nuovo |
|
Invia “m” quando premuto e “z” quando premuto di nuovo |
|
Invia “n” quando premuto e “z” quando premuto di nuovo |
|
Invia “o” quando premuto e “z” quando premuto di nuovo |
|
Invia “p” quando premuto e “z” quando premuto di nuovo |
|
Scegli per entrare nell’interfaccia delle funzioni personalizzate; ci sono sei tasti 1,2,3,4,5,6; con questi tasti, puoi espandere alcune funzioni da solo |
|
Clicca per inviare “w” |
|
Clicca per inviare “y” |
|
Clicca per inviare “x” |
|
Clicca per inviare “c”, clicca di nuovo per inviare “d” |

















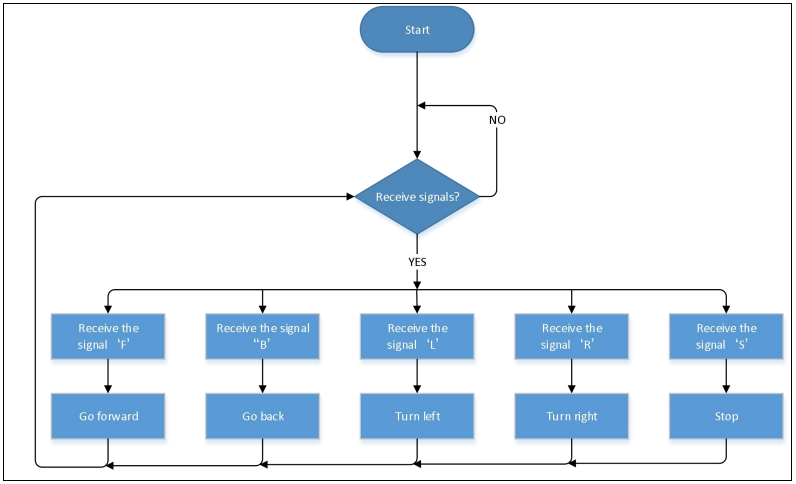
(3)Diagramma di Flusso:
(4)Schema di Collegamento:
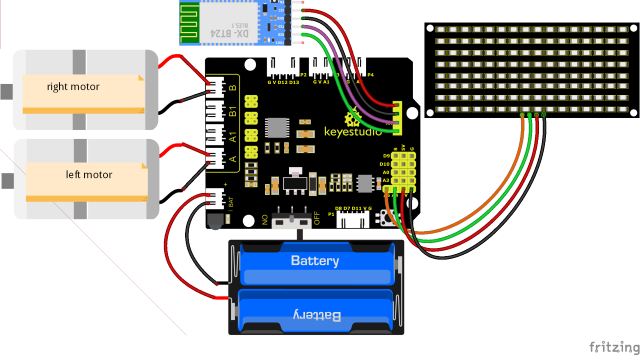
GND, VCC, SDA e SCL della matrice di LED 8x16 sono collegati rispettivamente a -(GND), +(VCC), SDA, SCL della scheda di espansione;
I pin STATE e BRK del modulo Bluetooth non devono essere collegati.
(5)Codice di Test:
(Nota: Durante il caricamento del codice, il modulo Bluetooth deve essere scollegato; il Bluetooth potrà essere riconnesso dopo il completamento del caricamento. Altrimenti, il codice potrebbe non essere caricato correttamente.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 17.
bluetooth Control tank
http://www.keyestudio.com
*/
//Array, utilizzato per salvare i dati delle immagini, può essere calcolato manualmente o ottenuto dallo strumento di modulo
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
#define SCL_Pin A5 //Imposta il pin del clock come A5
#define SDA_Pin A4 //Imposta il pin dei dati come A4
#define ML_Ctrl 4 //Definisce il pin di controllo della direzione del motore sinistro
#define ML_PWM 6 //Definisce il pin di controllo PWM del motore sinistro
#define MR_Ctrl 2 //Definisce il pin di controllo della direzione del motore destro
#define MR_PWM 5 //Definisce il pin di controllo PWM del motore destro
char ble_val; //Utilizzato per memorizzare il valore ottenuto dal Bluetooth
void setup()
{
Serial.begin(9600);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
matrix_display(clear); //pulisce lo schermo
matrix_display(start01); //mostra l'immagine di avvio
}
void loop()
{
if (Serial.available())
{
ble_val = Serial.read();
Serial.println(ble_val);
}
switch (ble_val)
{
case 'F': //il comando per andare avanti
Car_front();
break;
case 'B': //il comando per andare indietro
Car_back();
break;
case 'L': //il comando per girare a sinistra
Car_left();
break;
case 'R': //il comando per girare a destra
Car_right();
break;
case 'S': //il comando per fermarsi
Car_Stop();
break;
}
}
/***************Funzione per azionare il motore***************/
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
matrix_display(back); //Va indietro
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
matrix_display(front); //mostra l'immagine per andare avanti
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
matrix_display(left); //mostra l'immagine per girare a sinistra
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
matrix_display(right); //mostra l'immagine per girare a destra
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
matrix_display(STOP01); //mostra l'immagine di stop
}
//Questa funzione è utilizzata per la visualizzazione sulla matrice di punti
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //Funzione per chiamare la condizione di inizio trasferimento dati
IIC_send(0xc0); //Sceglie un indirizzo
for (int i = 0; i < 16; i++) //I dati del pattern hanno 16 byte
{
IIC_send(matrix_value[i]); //trasferisce i dati del pattern
}
IIC_end(); //Termina il trasferimento dei dati del pattern
IIC_start();
IIC_send(0x8A); //controllo display, seleziona la larghezza dell'impulso come 4/16
IIC_end();
}
//Condizioni per l'inizio del trasferimento dati
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//il segnale di fine trasmissione dati
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//trasferisce i dati
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //ogni carattere ha 8 cifre, rilevate una ad una
{
if (send_data & mask) //imposta livelli alti o bassi in base a ogni bit (0 o 1)
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Porta il pin del clock SCL_Pin alto per fermare la trasmissione dati
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //abbassa il pin del clock SCL_Pin per cambiare i segnali di SDA
}
}
(6)Risultato del Test:
Dopo aver caricato il codice, connetti il robot al modulo Bluetooth e accoppia l’APP Bluetooth. Attiva l’interruttore di alimentazione dello shield per il controllo dei motori. Posiziona il robot sul pavimento; puoi utilizzare i pulsanti dell’app Bluetooth per controllare il robot.
Le frecce su, giù, sinistra e destra controllano rispettivamente il movimento in avanti, indietro, sinistra e destra del robot.

Clicca il pulsante joystick e trascina la direzione del punto nero nel cerchio bianco per controllare la direzione di movimento del robot.
Clicca il pulsante Gravità e inclina il telefono nelle direzioni avanti, indietro, sinistra e destra; il robot si muoverà nella direzione in cui il telefono viene inclinato.
