Project 8 Line Tracking of Smart Car
1.Introduction
This project introduces a simple and automatic line tracking system of a car based on Arduino microcontroller.This car,regarding UNO as main control, detects black line by IR photoelectric sensor and send the feedback to Arduino. Arduino will analyze the feedback signal and then control the driver motor to adjust the car diversion. Finally the car is able to go around the black line automatically. In addition, you can observe the state of the car through keyestudio 1602 I2C module.
2.Principle
Black absorbs most light. When the panel isn’t black, most IR emitted by the sensor is reflected back. So the sensor outputs low level at 0.
When there is a sensor above black line, since reflectivity of black is small,little IR is reflected back under demand that the sensor works. Therefore, the sensor output 1.
We just need to know the output of the sensor is 1 or 0 with Arduino to detect black line.
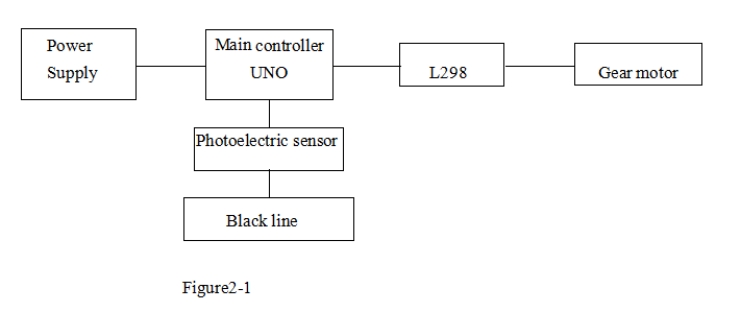
Arduino controls the motion of the car according to received signal. The system scheme is showed by the following picture 1-1.

The system is composed of main control circuit, power supply, IR detecting module, motor and driver module. The structure chart of the system is showed by picture 2-1.
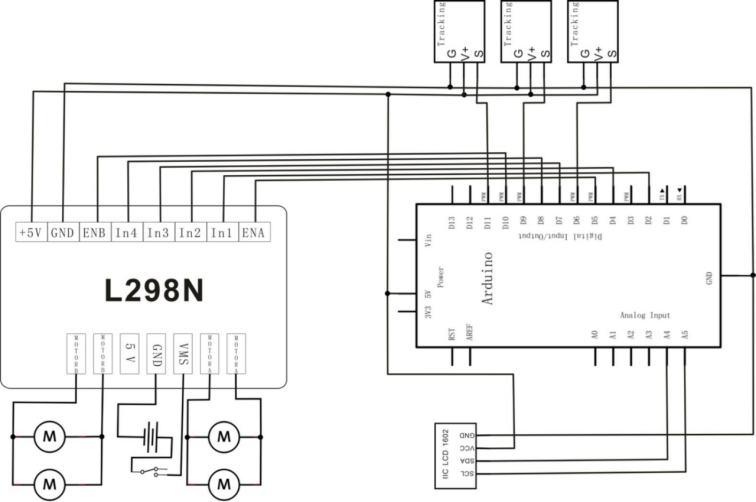
3.Schematic Diagram
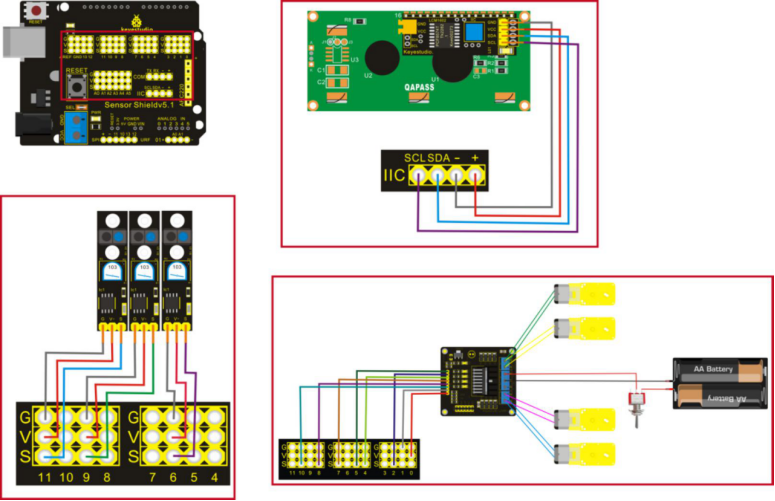
4.Connection Diagram
**5.Sample Code **
#include <LiquidCrystal_I2C.h>
#include <Wire.h>
#define SensorLeft 6 //input pin of left sensor
#define SensorMiddle 9 //input pin of middle sensor
#define SensorRight 11 //input pin of right sensor
unsigned char SL; //state of left sensor
unsigned char SM; //state of middle sensor
unsigned char SR; //state of right sensor
#define Lpwm_pin 5 //pin of controlling speed---- ENA of motor driver board
#define Rpwm_pin 10 //pin of controlling speed---- ENA of motor driver board
int pinLB=2; //pin of controlling diversion----IN1 of motor driver board
int pinLF=4; //pin of controlling diversion----IN2 of motor driver board
int pinRB=7; //pin of controlling diversion----IN3 of motor driver board
int pinRF=8; //pin of controlling diversion----IN4 of motor driver board
unsigned char Lpwm_val =180;//the speed of left wheel at 180 in initialization
unsigned char Rpwm_val = 180;//the speed of right wheel at 180 in initialization
int Car_state=0; //state of car moving
LiquidCrystal_I2C lcd(0x27,16,2); // set the LCD address to 0x27 for a 16 chars and 2
void LCD1602_init(void)
{
lcd.init();
lcd.backlight();
lcd.clear();
}
void Sensor_IO_Config()
{
pinMode(SensorLeft,INPUT);
pinMode(SensorMiddle,INPUT);
pinMode(SensorRight,INPUT);
}
void Sensor_Scan(void)
{
SL = digitalRead(SensorLeft);
SM = digitalRead(SensorMiddle);
SR = digitalRead(SensorRight);
}
void M_Control_IO_config(void)//initialized function of IO of motor driver
{
pinMode(pinLB,OUTPUT); // pin 2--IN1 of motor driver board
pinMode(pinLF,OUTPUT); // pin 4--IN2 of motor driver board
pinMode(pinRB,OUTPUT); // pin 7--IN3 of motor driver board
pinMode(pinRF,OUTPUT); // pin 8--IN4 of motor driver board
pinMode(Lpwm_pin,OUTPUT); // pin 5 (PWM) --ENA of motor driver board
pinMode(Rpwm_pin,OUTPUT); // pin 10 (PWM) --ENB of motor driver board
}
void Set_Speed(unsigned char Left,unsigned char Right)//setting function of speed
{
analogWrite(Lpwm_pin,Left);
analogWrite(Rpwm_pin,Right);
}
void advance() // going forwards
{
digitalWrite(pinRB,LOW); // making motor move towards right rear
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,LOW); // making motor move towards left rear
digitalWrite(pinLF,HIGH);
Car_state = 1;
show_state();
}
void turnR() //turning on the right(dual wheels)
{
digitalWrite(pinRB,LOW); //making motor move towards right rear
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,LOW); //making motor move towards left front
Car_state = 4;
show_state();
}
void turnL() //turning on the left(dual wheels)
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,LOW ); //making motor move towards right front
digitalWrite(pinLB,LOW); //making motor move towards left rear
digitalWrite(pinLF,HIGH);
Car_state = 3;
show_state();
}
void stopp() //stop
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,HIGH);
Car_state = 5;
show_state();
}
void back() //back
{
digitalWrite(pinRB,HIGH); //making motor move towards right rear
digitalWrite(pinRF,LOW);
digitalWrite(pinLB,HIGH); //making motor move towards left rear
digitalWrite(pinLF,LOW);
Car_state = 2;
show_state() ;
}
void show_state(void) //showing current state of the car
{
lcd.setCursor(0, 1); //showing from second row
switch(Car_state)
{
case 1:lcd.print(" Go ");Serial.print("\n GO");
break;
case 2:lcd.print("Back ");Serial.print("\n Back");
break;
case 3:lcd.print("Left ");Serial.print("\n Left");
break;
case 4:lcd.print("Right");Serial.print("\n Right");
break;
case 5:lcd.print("Stop ");Serial.print("\n Stop");
break;
default:
break;
}
}
void setup()
{
LCD1602_init();
Sensor_IO_Config();
M_Control_IO_config(); //motor controlling the initialization of IO
Set_Speed(Lpwm_val,Rpwm_val); //setting initialization of speed
lcd.clear();
lcd.setCursor(0, 0); //cursor set in first row and first column,
lcd.print(" Wait Signal ");
stopp();
}
unsigned char old_SL,old_SM,old_SR;
void loop()
{
Sensor_Scan();
if (SM == HIGH)// middle sensor in black area
{
if (SL == LOW & SR == HIGH) // black on left, white on right, turn left
{
turnR();
}
else if (SR == LOW & SL == HIGH) // white on left, black on right, turn right
{
turnL();
}
else // white on both sides, going forward
{
advance();
}
}
else // middle sensor on white area
{
if (SL== LOW & SR == HIGH)// black on left, white on right, turn left
{
turnR();
}
else if (SR == LOW & SL == HIGH) // white on left, black on right, turn right
{
turnL();
}
else // all white, stop
{
back();
delay(100);
stopp() ;
}
}
}