Project 9 Ultrasonic Obstacle Avoidance of Smart Car
1.Introduction
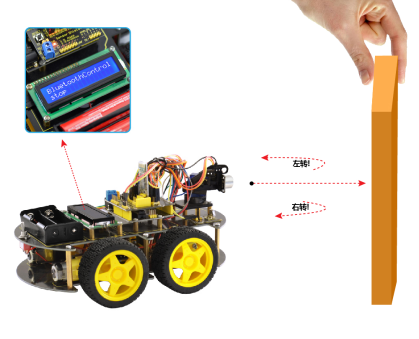
This project,regarding Arduino UNO as main control, is to detect front obstacle by ultrasonic sensor and platform motor, and send the feedback to Arduino. Arduino will analyze the feedback signal and then control the driver motor to adjust the car diversion. Finally, the car is able to avoid obstacle automatically and to keep going.
2.Principle
Ultrasonic detecting distance: one port emits high level more than 10 US. Once outputting level, open potentiometer to time. When the port becomes low level, read out current value. Use the time of detecting distance to calculate distance.
Use ultrasonic to detect the distance between obstacle and car, so that control the motion of the car according to the data.
If the distance between the car and obstacle is less than 20 cm, the car goes backward; if the distance is no less than 40 cm, the car goes forwards; if the distance is less than 40cm , the motor turns to detect the distance between car and left obstacle or right obstacle; if the distance between car and left obstacle, the distance between car and right obstacle are less than 15 cm, the car goes backward; if the distance between car and left obstacle is larger, the car turns left; if the distance between car and left obstacle is less than or equal to the distance between car and right obstacle, the car turns right.
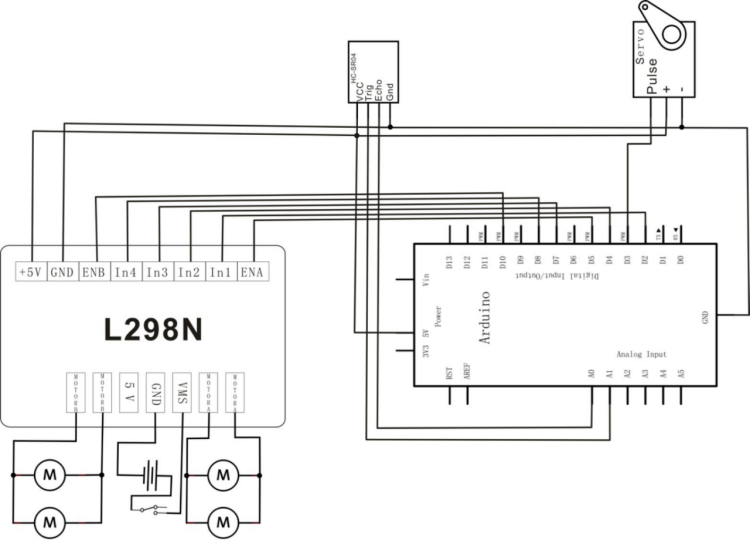
3.Schematic Diagram
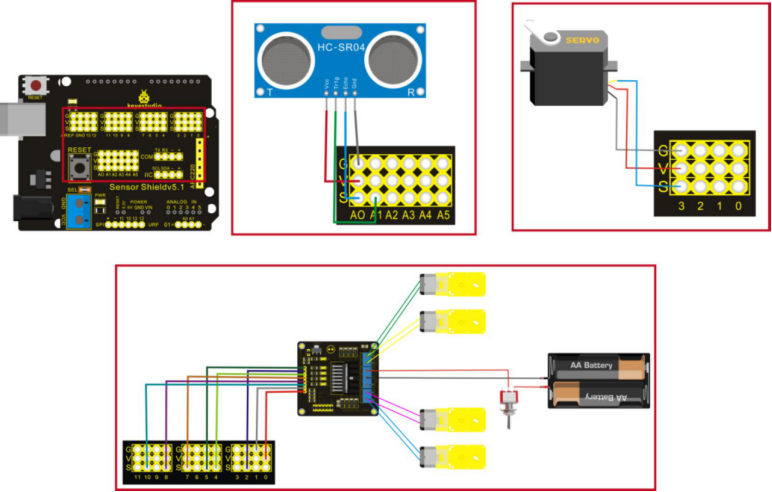
4.Connection Diagram
5.Sample Code
#include <Servo.h>
int pinLB = 2; // defining pin 12
int pinLF = 4; // defining pin 3
int pinRB = 7; // defining pin 13
int pinRF = 8; // defining pin 11
int Lpwm_pin = 5; //adjusting speed
int Rpwm_pin = 10; //adjusting speed //
unsigned char Lpwm_val = 200;
unsigned char Rpwm_val = 200;
int inputPin = A0; // defining receiving pin of ultrasonic signal
int outputPin =A1; // defining emitting pin of ultrasonic signal
int Fspeedd = 0; // forward speed
int Rspeedd = 0; // right speed
int Lspeedd = 0; // left speed
int directionn = 0; // front=8 back=2 left=4 right=6
Servo myservo; // setting myservo
int delay_time = 250; // time for servo motor turning backward
int Fgo = 8; // going forward
int Rgo = 6; // turning right
int Lgo = 4; // turning left
int Bgo = 2; // turning backward
void setup()
{
Serial.begin(9600); // defining output pin of motor
pinMode(pinLB,OUTPUT); // pin 12
pinMode(pinLF,OUTPUT); // pin 3 (PWM)
pinMode(pinRB,OUTPUT); // pin 13
pinMode(pinRF,OUTPUT); // pin 11 (PWM)
pinMode(inputPin, INPUT); // defining input pin of ultrasonic
pinMode(outputPin, OUTPUT); // defining output pin of ultrasonic
myservo.attach(3); // defining output pin9 of motor
}
void advance() // going forward
{
digitalWrite(pinLB,LOW); // right wheel going forward
digitalWrite(pinRB, LOW); // left wheel going forward
digitalWrite(pinLF,HIGH);
digitalWrite(pinRF,HIGH);
}
void stopp() //stop
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,HIGH);
}
void right() //turning right(single wheel)
{
digitalWrite(pinRB,LOW); //making motor move towards right rear
digitalWrite(pinRF,HIGH);
digitalWrite(pinLB,HIGH);
digitalWrite(pinLF,LOW); //making motor move towards left front
}
void left() //turning left(single wheel)
{
digitalWrite(pinRB,HIGH);
digitalWrite(pinRF,LOW ); //making motor move towards right front
digitalWrite(pinLB,LOW); //making motor move towards left rear
digitalWrite(pinLF,HIGH);
}
void back() //going backward
{
digitalWrite(pinRB,HIGH); //making motor move towards right rear
digitalWrite(pinRF,LOW);
digitalWrite(pinLB,HIGH); //making motor move towards left rear
digitalWrite(pinLF,LOW);
}
void detection() //measuring 3 angles(0.90.179)
{
int delay_time = 250; // time for servo motor turning backward
ask_pin_F(); // reading out the front distance
if(Fspeedd < 20) // assuming the front distance less than 10cm
{
stopp(); // clear output material
delay(100);
back(); // going backward for 0.2 second
delay(200);
}
if(Fspeedd < 40) // assuming the front distance less than 25cm
{
stopp();
delay(100); // clear output material
ask_pin_L(); // reading out the left distance
delay(delay_time); // waiting servo motor to be stable
ask_pin_R(); // reading out the right distance
delay(delay_time); // waiting servo motor to be stable
if(Lspeedd > Rspeedd) //assuming left distance more than right distance
{
directionn = Lgo; //turning left
}
if(Lspeedd <= Rspeedd) //assuming left distance less than or equal to right distance
{
directionn = Rgo; //turning right
}
if (Lspeedd < 15 && Rspeedd < 15) //assuming both left distance and right distance less than 10cm
{
directionn = Bgo; //going backward
}
}
else //assuming the front distance more than 25 cm
{
directionn = Fgo; //going forward
}
}
void ask_pin_F() // measuring the front distance
{
myservo.write(90);
digitalWrite(outputPin, LOW); // ultrasonic launching low voltage at 2μs
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // ultrasonic launching high voltage at 10μs,at least at10μs
delayMicroseconds(10);
digitalWrite(outputPin, LOW); // keeping ultrasonic launching low voltage
float Fdistance = pulseIn(inputPin, HIGH); // time of error reading
Fdistance= Fdistance/5.8/10; // converting time into distance(unit:cm)
Fspeedd = Fdistance; // reading-in Fspeedd(fore speed) with distance
}
void ask_pin_L() // measuring left distance
{
myservo.write(5);
delay(delay_time);
digitalWrite(outputPin, LOW); // ultrasonic launching low voltage at 2μs
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // ultrasonic launching high voltage at 10μs,at least at10μs
delayMicroseconds(10);
digitalWrite(outputPin, LOW); // keeping ultrasonic launching low voltage
float Ldistance = pulseIn(inputPin, HIGH); // time of error reading
Ldistance= Ldistance/5.8/10; // converting time into distance(unit:cm)
Lspeedd = Ldistance; //reading-in Lspeedd(left speed) with distance
}
void ask_pin_R() // measuring right distance
{
myservo.write(177);
delay(delay_time);
digitalWrite(outputPin, LOW); // ultrasonic launching low voltage at 2μs
delayMicroseconds(2);
digitalWrite(outputPin, HIGH); // ultrasonic launching high voltage at 10μs,at least at10μs
delayMicroseconds(10);
digitalWrite(outputPin, LOW); // keeping ultrasonic launching low voltage
float Rdistance = pulseIn(inputPin, HIGH); // time of error reading
Rdistance= Rdistance/5.8/10; // onverting time into distance(unit:cm)
Rspeedd = Rdistance; // reading-in Rspeedd(right speed) with distance
}
void loop()
{
myservo.write(90); //making motor regression, being ready for next measurement
detection(); //measuring angle and deciding which direction it moves towards
if(directionn == 2) //supposing direction = 2(back up)
{
back();
delay(800); // back up
left() ;
delay(200); //moving slightly towards left(avoiding locked)
}
if(directionn == 6) //supposing direction = 6(turning right)
{
back();
delay(100);
right();
delay(600); // turning right
}
if(directionn == 4) //supposing direction = 4(turning left)
{
back();
delay(600);
left();
delay(600); // turning left
}
if(directionn == 8) //supposing direction = = 8(going forwards)
{
advance(); // going forwards normally
delay(100);
}
}