プロジェクト4: ライントラッキングセンサー
(1)説明:

トラッキングセンサーは実際には赤外線センサーです。ここで使用されているコンポーネントはTCRT5000赤外線チューブです。
その動作原理は、赤外線の色に対する反射率の違いを利用し、反射信号の強度を電流信号に変換することです。
検出プロセス中、黒はHIGHレベルでアクティブになり、白はLOWレベルでアクティブになります。検出高さは0〜3cmです。
Keyestudio 3チャンネルライントラッキングモジュールは、3セットのTCRT5000赤外線チューブを1枚のボードに統合しており、配線と制御がより便利になっています。
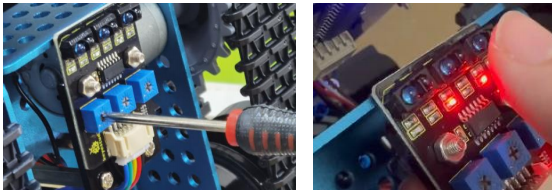
ライントラッキングセンサーが期待通りに動作しない場合は、ドライバーを使用してポテンショメーターを調整し、感度を高める必要があります。指をセンサーに近づけると、ボード上のLEDライトが点灯し、指を離すとLEDライトが消灯します。この時、感度が比較的良好な状態です。
(2)パラメータ:
動作電圧: 3.3-5V (DC)
インターフェース: 5PIN
出力信号: デジタル信号
検出高さ: 0-3 cm
特記事項: テスト前に、センサーのポテンショメーターを回して検出感度を調整してください。LEDがONとOFFの閾値に調整されている時、感度が最も良い状態です。
注意: ライントラッキングセンサーはロボットの底面下部に取り付けられています。
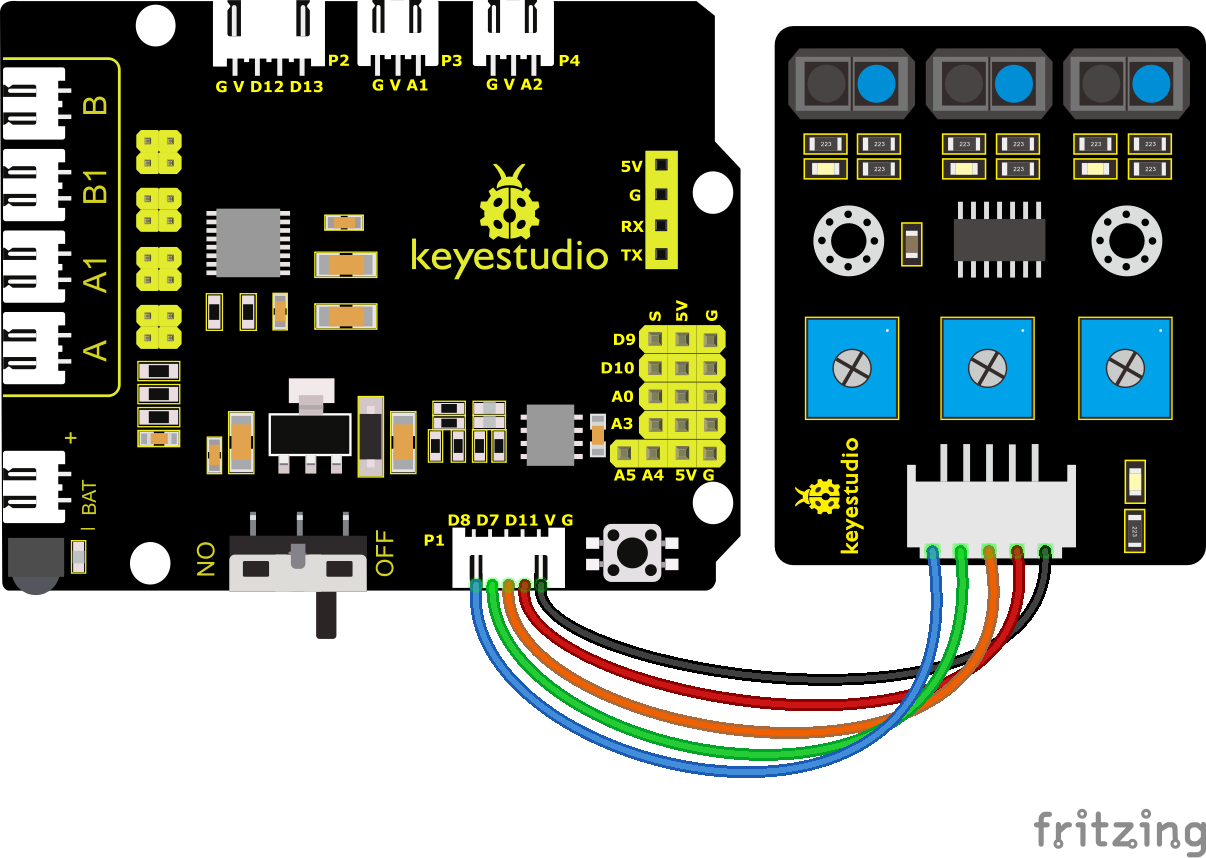
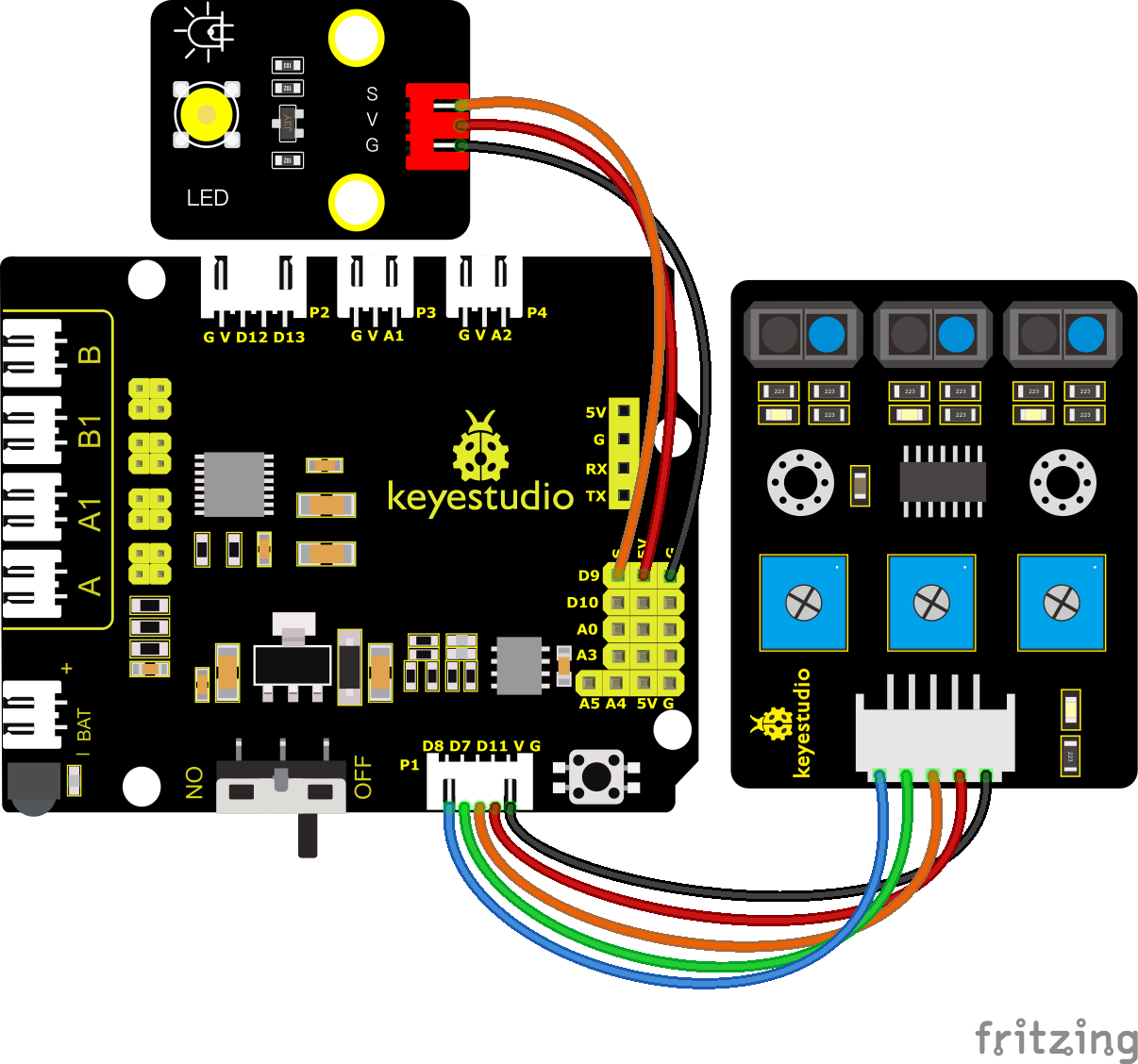
(3)接続図:
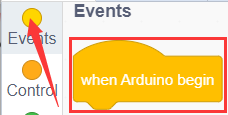
(4)テストコード:
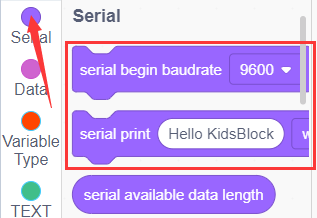
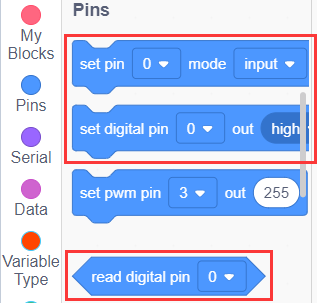
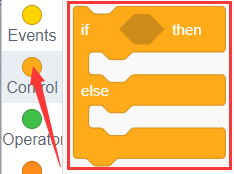
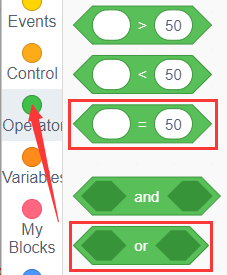
以下のようにブロックをドラッグしてコードを編集することもできます。
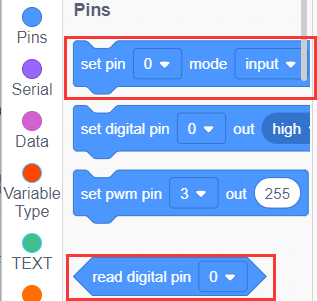
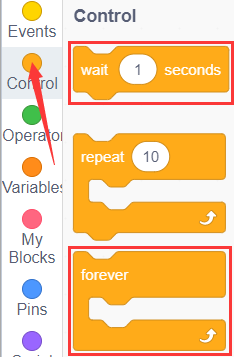
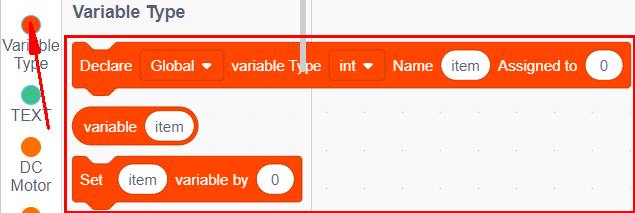
完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードにもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードが失敗する可能性があります。)

(5)テスト結果:
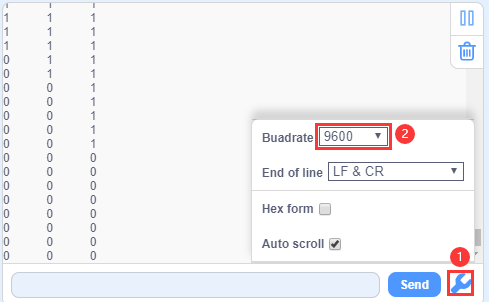
コードを開発ボードにアップロードし、シリアルモニターを9600に設定してライントラッキングセンサーを確認します。信号が受信されていない場合、表示される値は1(HIGHレベル)です。センサーを紙で覆うと値が0に変わります。
(6)応用練習:
このセンサーでLEDを制御できます。LEDはD9に接続されています。センサーを覆うと、LEDが点灯します。
以下のようにブロックをドラッグしてコードを編集することもできます。

完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードにもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードが失敗する可能性があります。)
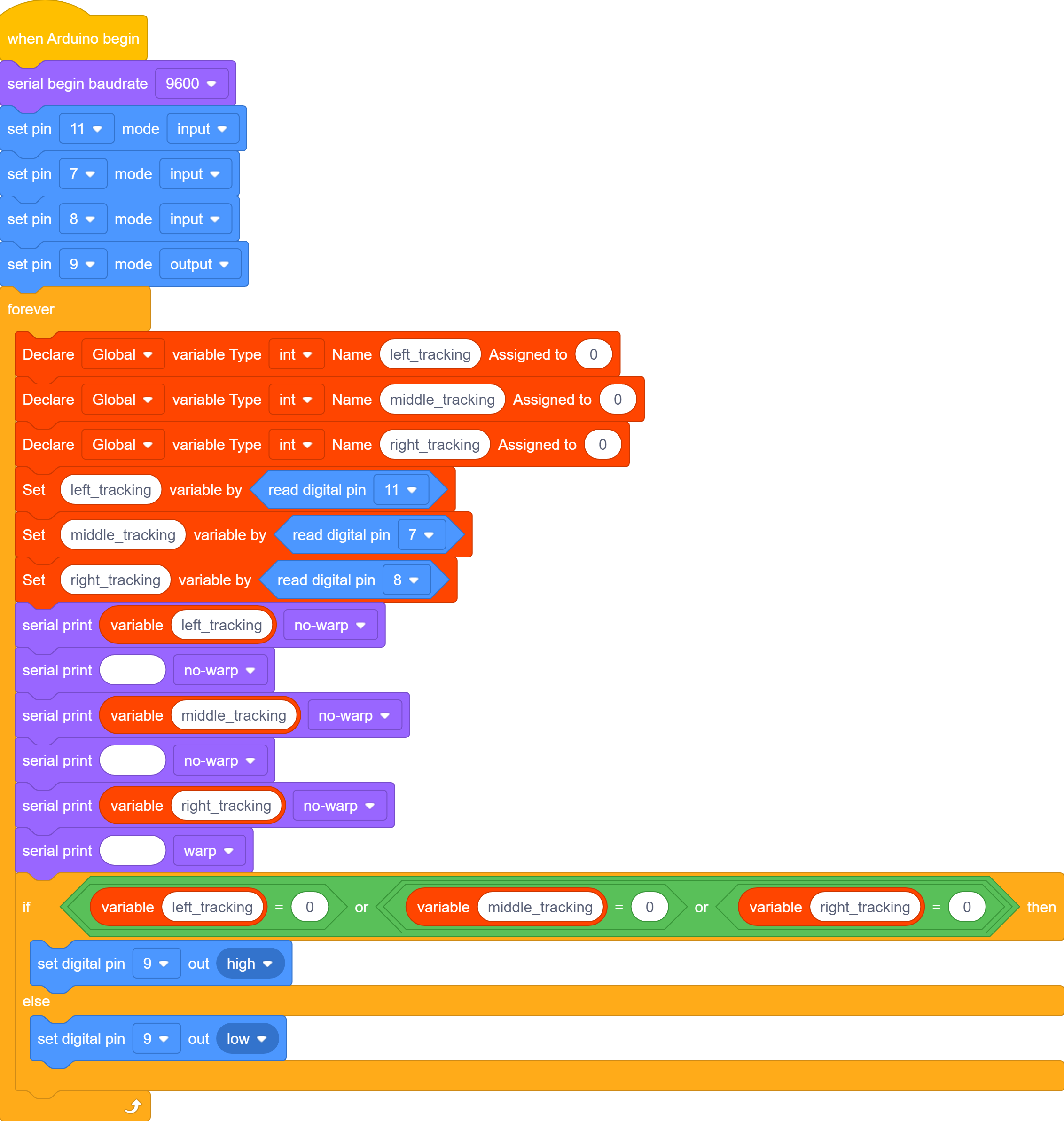
物体(紙や指など)がライントラッキングセンサーに近づくと、センサーは自身が発した返信信号を検出し、LEDモジュールが点灯します。センサーが返信信号を検出しない場合、LEDモジュールは消灯します。
