プロジェクト 13: 限られた空間内での走行タンク
(1)説明:
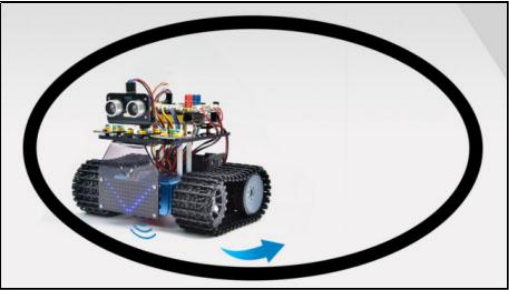
スマートカーの超音波追跡および障害物回避機能については、前のプロジェクトで紹介しました。ここでは、前のコースの知識を組み合わせて、スマートカーを特定の空間内で動くように制限することを目的としています。実験では、ライントラッキングセンサーを使用してスマートカーの周囲に黒線があるかどうかを検出し、検出結果に応じて2つのモーターの回転を制御することで、黒線で描かれた円の中にスマートカーを閉じ込めます。
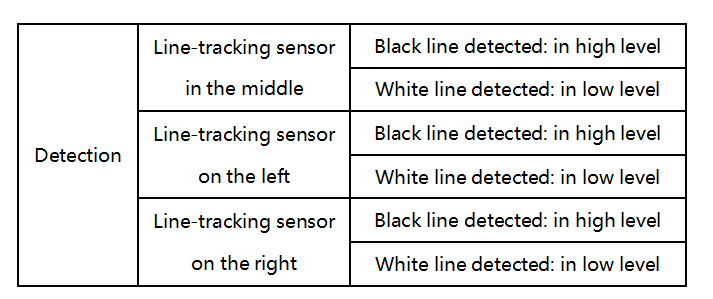
スマートカーの具体的なロジックは以下の表に示すとおりです:
条件 |
動作 |
|---|---|
3つのライントラッキングセンサーのうち1つが黒線を検出した場合 |
後退(PWMを150に設定)その後左折(PWMを150に設定) |
どれも黒線を検出しない場合 |
前進(PWMを100に設定) |
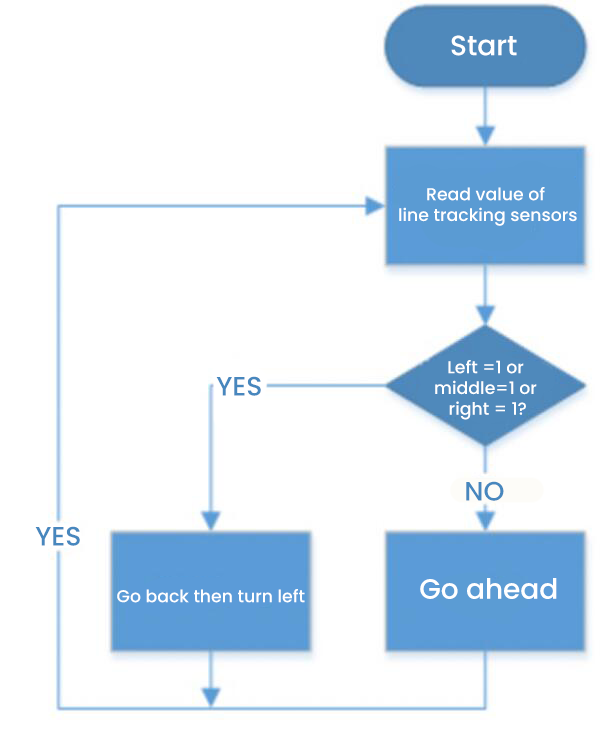
(2)フローチャート
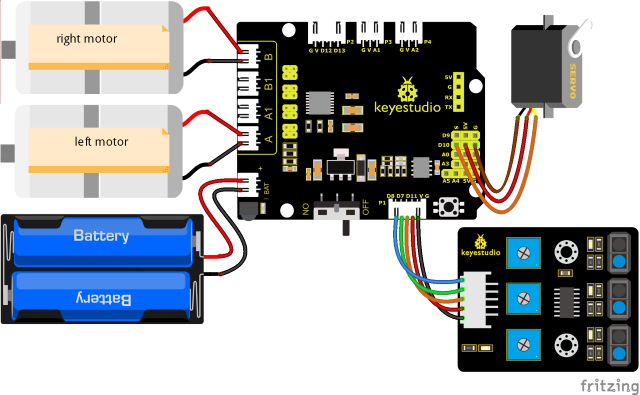
(3)接続図:
(4)テストコード:
以下のようにブロックをドラッグしてコードを編集することもできます
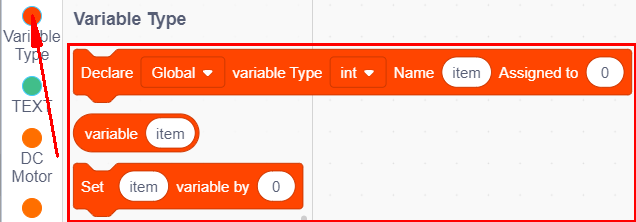
(1)
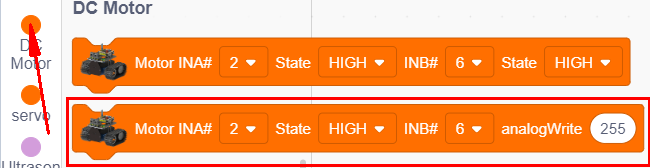
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
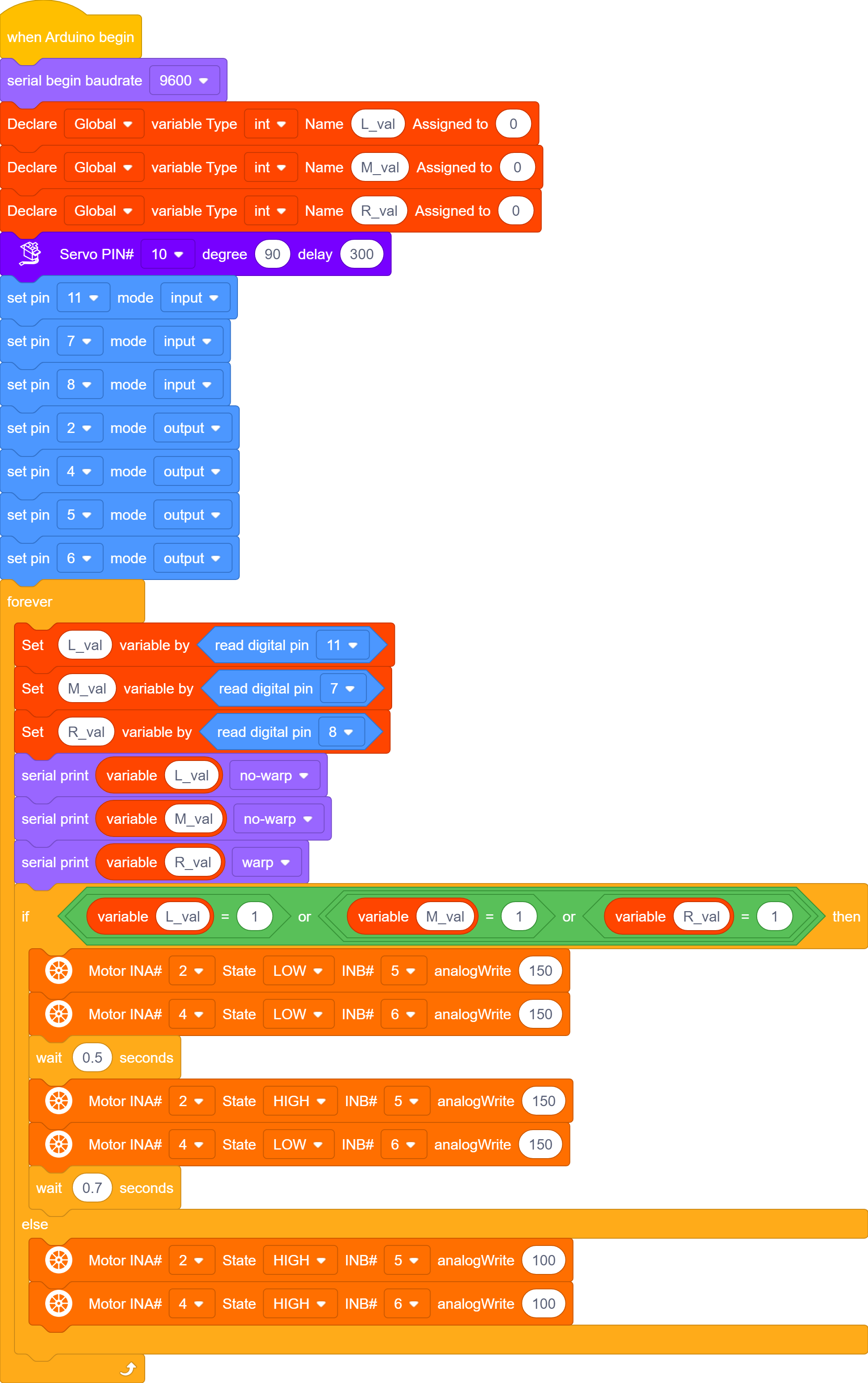
完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用するため、Bluetoothシリアル通信と競合し、アップロードが失敗する可能性があります。)
(5)テスト結果:
テストコードを正常にアップロードして電源を入れると、スマートカーは黒線で描かれた円の中を走行します。