プロジェクト10:光追跡タンク
(1)概要:
前のプロジェクトでは、スマートカーのさまざまなセンサー、モジュール、および拡張ボードの使用方法について詳しく説明しました。次はスマートカーのプロジェクトに移りましょう。光追跡スマートカーは、その名の通り、光を追いかけることができるスマートカーです。
フォトレジスターとモータードライブのプロジェクトの知識を組み合わせて、光追跡スマートカーを作ることができます。このプロジェクトでは、2つのフォトレジスターモジュールを使用してスマートカーの左右の光の強度を検出し、対応するアナログ値を読み取り、この2つのデータに基づいて2つのモーターの回転を制御することで、スマートカーの動きを制御します。
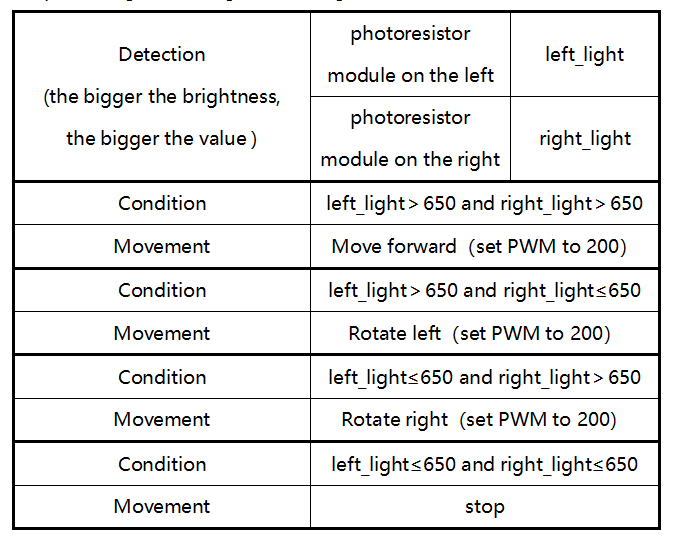
光追跡スマートカーの具体的なロジックは以下の通りです。
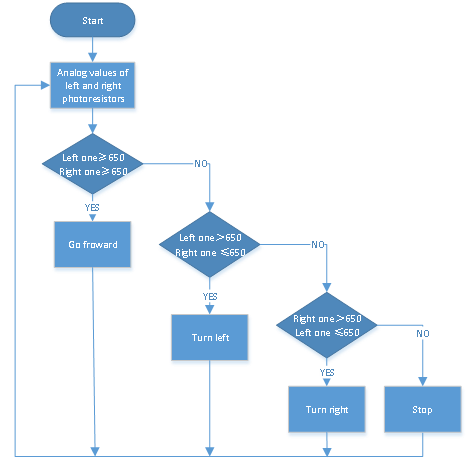
(2)フローチャート:
(3)接続図:
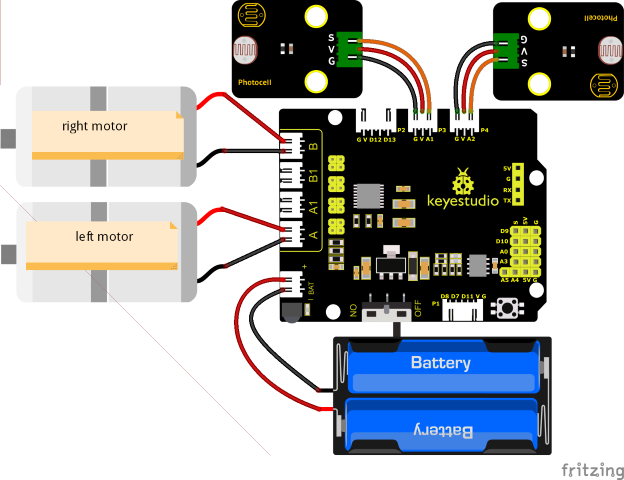
注意:左側のフォトレジスターモジュールのピン「G」、「V」、Sはそれぞれ G (GND)、V (VCC)、A1 に接続されています。
右側のフォトレジスターモジュールのピン「G」、「V」、Sはそれぞれ G (GND)、V (VCC)、A2 に接続されています。
4ピンケーブルはA、A1、B1、Bと表示されています。右後方モーターは8833モータードライバー拡張ボードのBポートに接続され、左前方モーターはAポートに接続されています。
(4)テストコード:
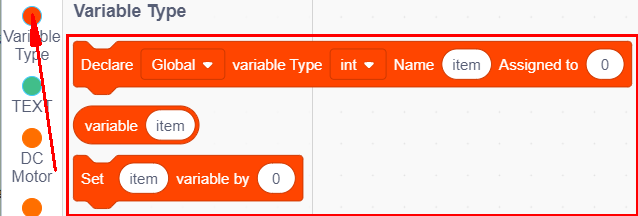
以下のようにブロックをドラッグしてコードを編集することもできます。
(1)
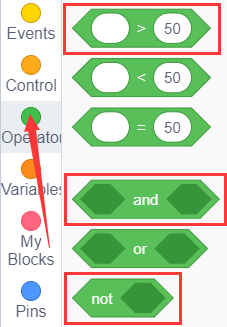
(2)
(3)
(4)
(5)
(6)
(7) 
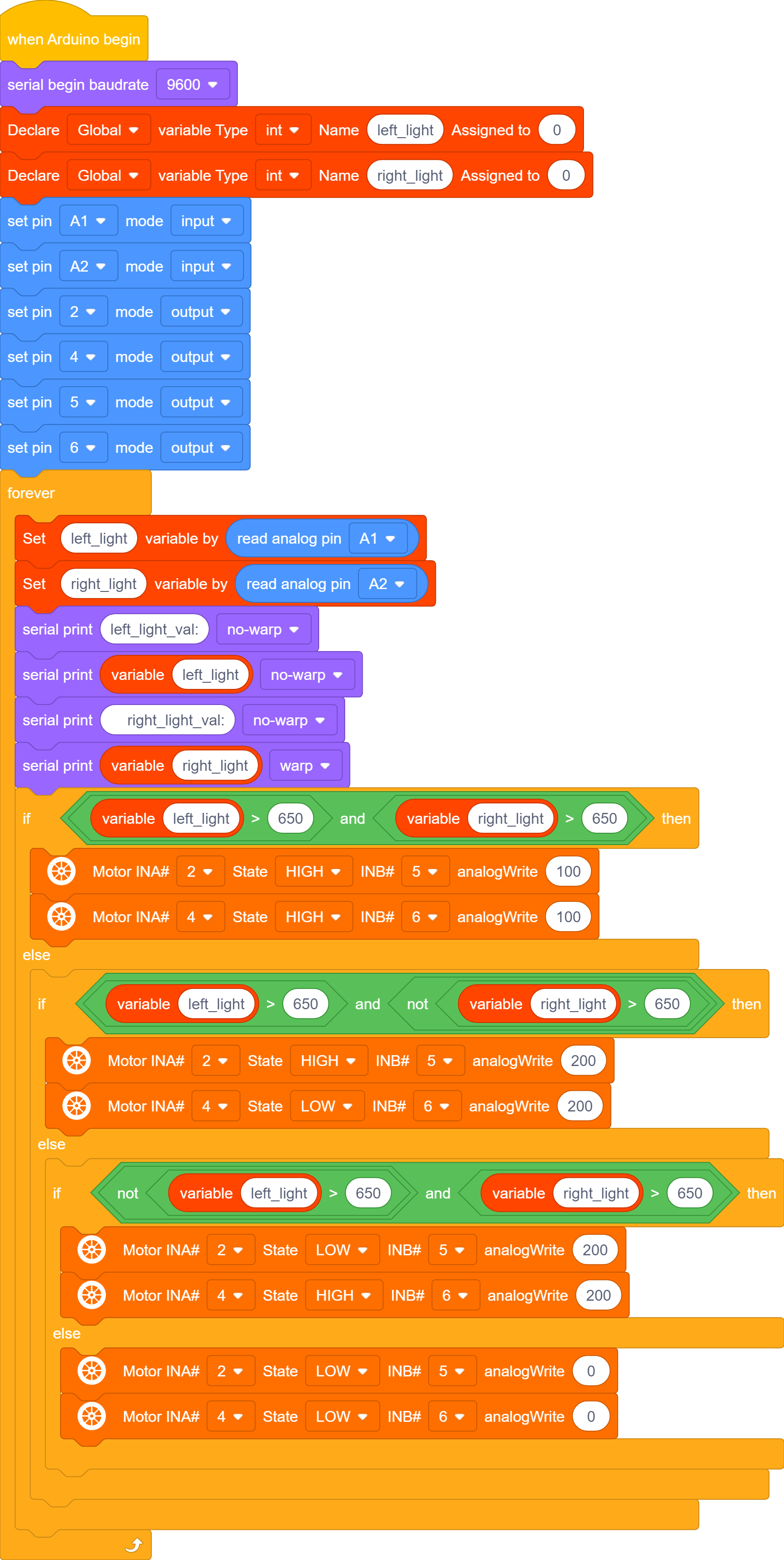
完全なテストコード
(注意:コード内の閾値650は、具体的な光の強度に応じて適宜調整できます。
コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用しており、BluetoothのシリアL通信と競合が発生し、コードのアップロードが失敗する可能性があります。)
(5)テスト結果:
テストコードのアップロードが成功したら、配線し、DIPスイッチをON側に切り替えて電源を入れると、スマートカーは光を追いかけて移動します。