プロジェクト15:IR(赤外線)リモートコントロールタンク
(1)説明:
赤外線リモートコントロールは、電動モーター、扇風機、その他多くの家電製品に見られる最も一般的なリモートコントロールの応用の一つです。このプロジェクトでは、これまでに学んだ知識を活用して、赤外線リモートコントロールスマートカーを作製します。
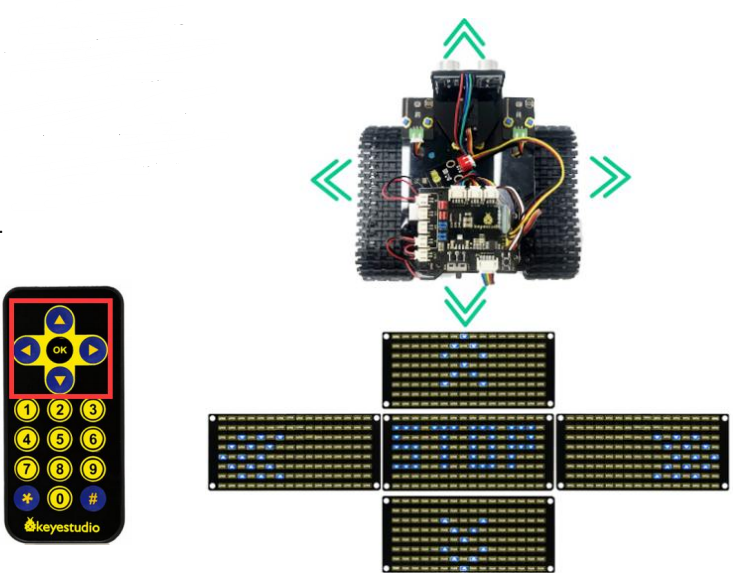
第9回のレッスンでは、赤外線リモコンの各キーに対応するキー値をテストしました。このプロジェクトでは、コード(キー値)を設定して、対応するボタンでスマートカーの動きを制御し、8X16 LEDドットマトリクスに動作パターンを表示させることができます。
スマートカーの具体的なロジックは以下の表のとおりです:
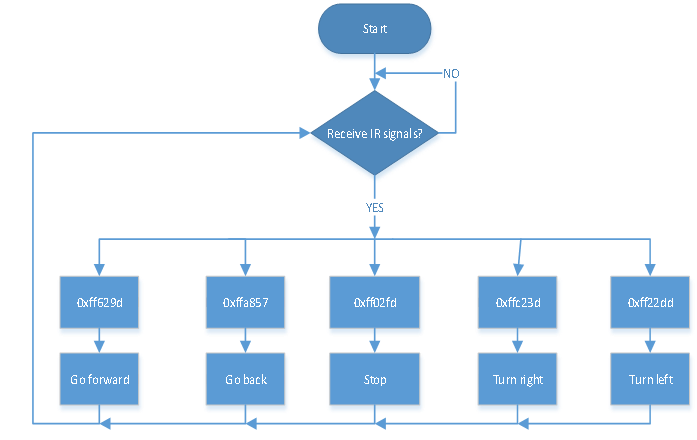
超音波キー |
キー値 |
キーからの指示 |
|---|---|---|
|
FF629D |
前進(PWMを200に設定) |
|
FFA857 |
後退(PWMを200に設定) |
|
FF22DD |
左折 |
|
FFC23D |
右折 |
|
FF02FD |
停止 |





初期設定:8X16 LEDドットマトリクスに" "パターンを表示
"パターンを表示
(2)フローチャート:
(3)接続図:
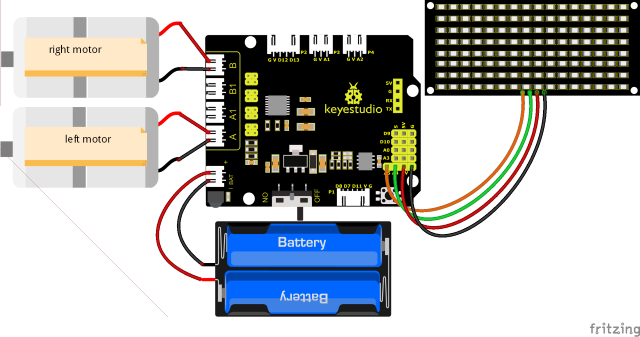
注意:
8x16 LEDパネルのGND、VCC、SDA、SCLは、拡張ボードのG(GND)、V(VCC)、A4、A5に接続されています。
8833ボードにはIR受信機が統合されているため、配線する必要はありません。IR受信機のピンはG(GND)、V(VCC)、D3です。
(4)テストコード:
ブロックを編集してコードを構築することができます。
(1)
(2)
(3) 
(4)
(5)
(6)
(7)
(8)
(9)
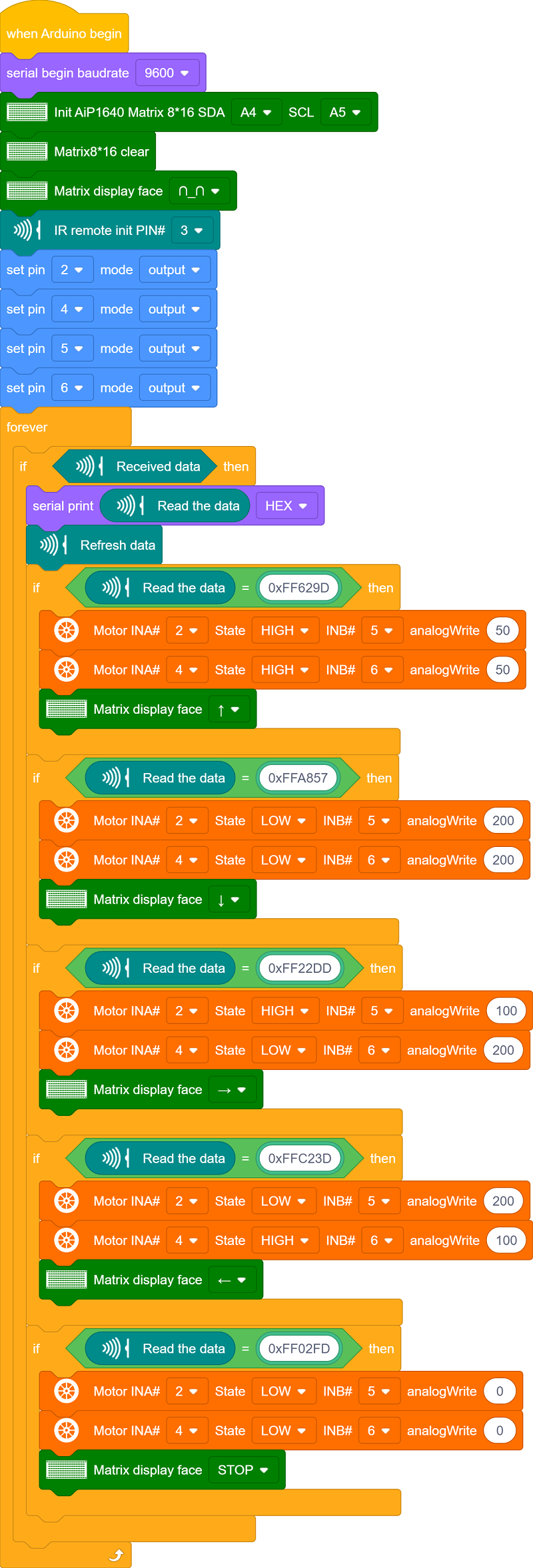
完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードにもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードに失敗する場合があります。)
(5)テスト結果:
テストコードのアップロードが成功し、電源を入れた後、IRリモートコントロールでスマートカーの動きを制御でき、8*16には動作に対応するパターンが表示されます。