プロジェクト14:ライントラッキングタンク
(1)概要:
前のプロジェクトでは、スマートカーを一定のスペース内で移動させる方法を紹介しました。このプロジェクトでは、これまで学んだ知識を活用して、ライントラッキングスマートカーを作製します。実験では、ライントラッキングセンサーを使用してスマートカーの周囲に黒いラインがあるかどうかを検出し、検出結果に応じて2つのモーターの回転を制御することで、スマートカーが黒いラインに沿って移動できるようにします。
スマートカーの具体的なロジックを以下の表に示します:
センサー |
検出内容 |
|---|---|
中央のライントラッキングセンサー |
黒いライン検出時:ハイレベル |
左側のライントラッキングセンサー |
黒いライン検出時:ハイレベル |
右側のライントラッキングセンサー |
黒いライン検出時:ハイレベル |
条件1 |
条件2 |
動作 |
|---|---|---|
中央の |
左側のライントラッキングセンサーが黒いラインを検出 |
左回転 |
中央の |
左側のライントラッキングセンサーが白いラインを検出 |
右回転 |
中央の |
左右両方のライントラッキングセンサーが白いラインを検出 |
前進 |
中央の |
左側のライントラッキングセンサーが黒いラインを検出 |
左回転 |
中央の |
左側のライントラッキングセンサーが白いラインを検出 |
右回転 |
中央の |
左右両方のライントラッキングセンサーが白いラインを検出 |
停止 |
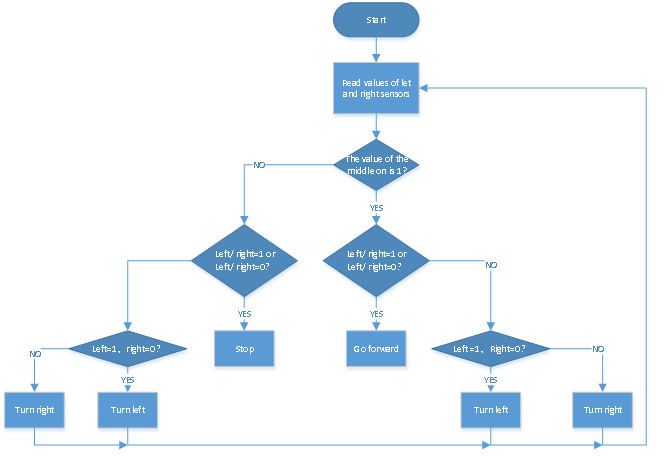
(2)フローチャート:
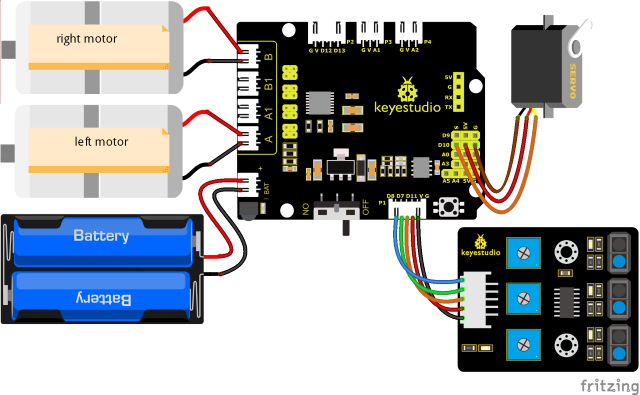
(3)接続図:
(4)テストコード:
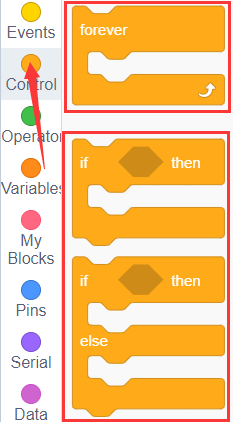
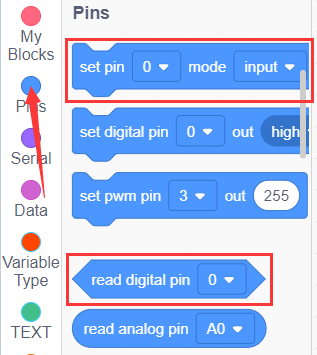
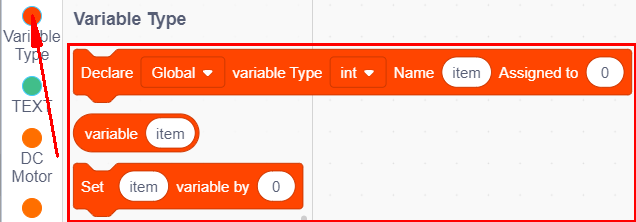
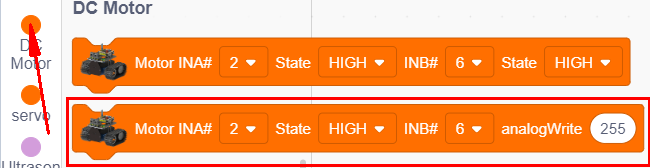
以下のようにブロックをドラッグしてコードを編集することもできます
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードが失敗する可能性があります。)

(5)テスト結果:
テストコードのアップロードが成功し、電源を入れると、スマートカーが黒いラインに沿って移動します。