プロジェクト11: 超音波追従タンク
(1)説明:
前のレッスンでは、光追従スマートカーについて学びました。このレッスンでは、その知識を組み合わせて超音波追従カーを作ることができます。このプロジェクトでは、超音波センサーを使用して車と前方の障害物との距離を検出し、そのデータに基づいて2つのモーターの回転を制御することで、スマートカーの動きを制御します。
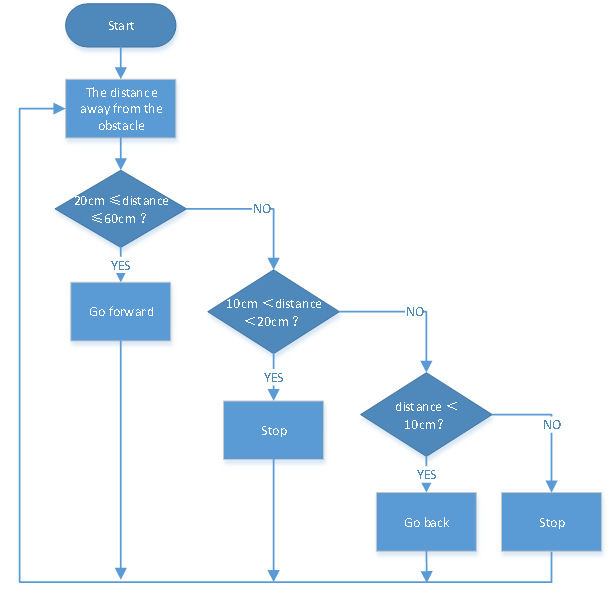
超音波追従スマートカーの具体的なロジックは、以下の表に示されています:
検出 |
設定 |
|---|---|
車と前方の障害物との距離(cm) |
サーボの角度を90°に設定 |
条件 |
動作 |
distance≥20 かつ distance≤50 |
前進 |
10<distance<20 |
停止 |
distance≤10 |
後退 |
(2)フローチャート:
(3)接続図:
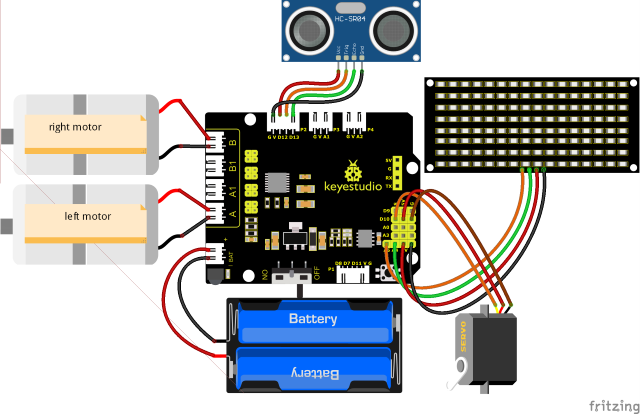
注意: 超音波センサー、サーボ、モーターの配線は前のプロジェクト実験と同じです。8x16 LEDパネルのGND、VCC、SDA、SCLはそれぞれ拡張ボードのG(GND)、V(VCC)、A4、A5に接続されています。
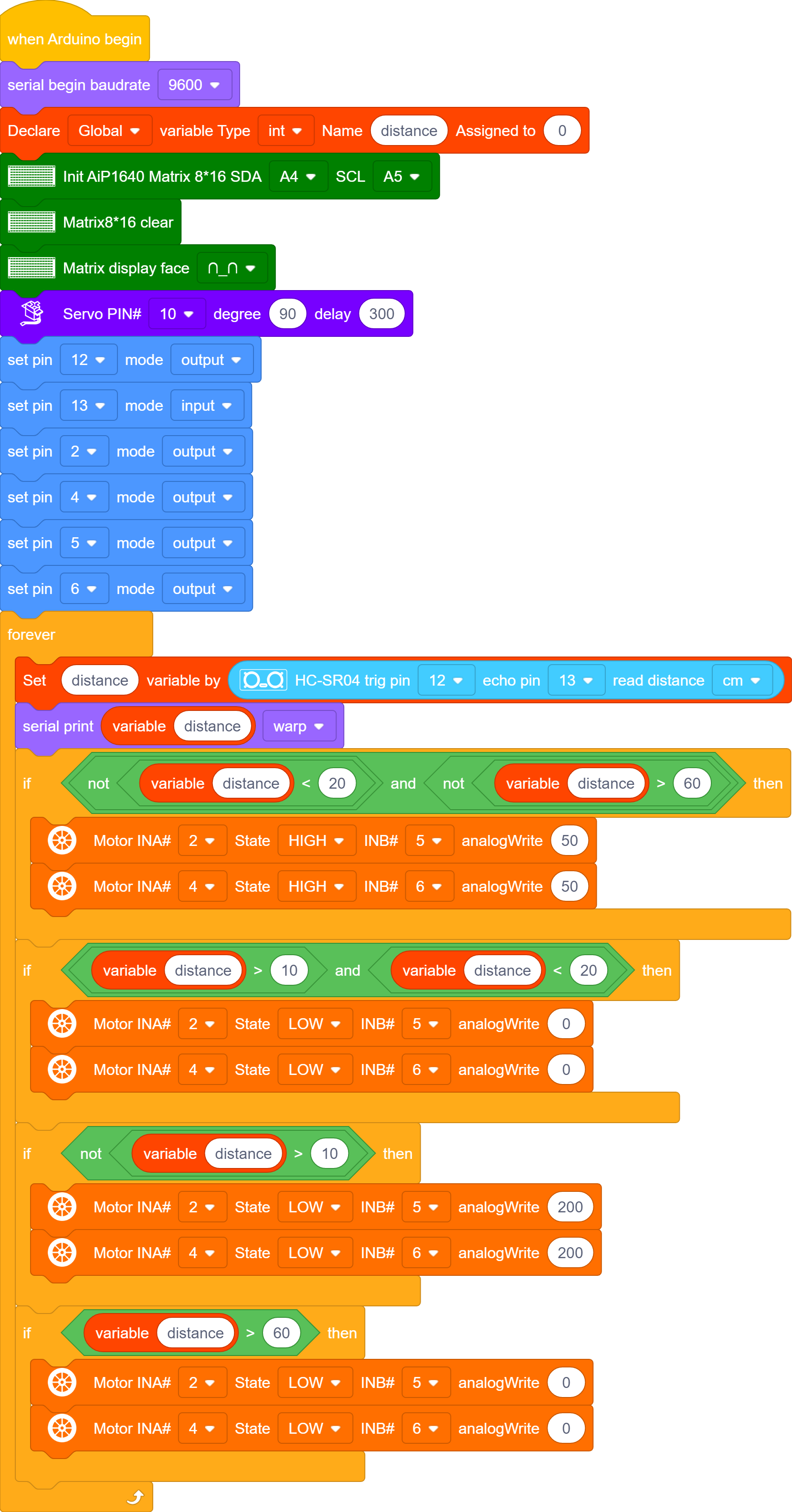
(4)テストコード:
以下のようにブロックをドラッグしてコードを編集することもできます。
(1)
(2)
(3)
(4)
(5)
(6)
(7) 
(8) 
(9) 
(10) 
完全なテストコード
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用しており、Bluetoothシリアル通信と競合が発生し、アップロードに失敗する可能性があります。)
(5)テスト結果:
コードをアップロードし、電源を入れ、DIPスイッチをONにします。サーボが90°回転し、8X16 LEDパネルに が表示され、車は障害物に追従して動きます。
が表示され、車は障害物に追従して動きます。