プロジェクト12 サーボ
1. 説明
このサーボは高性能かつ高精度で、最大回転角度は180°です。わずか9gの軽量設計で、さまざまなミニデバイスに最適です。さらに、起動時間が短く、低ノイズで安定性が高いのが特徴です。
2. 動作原理
角度範囲: 180°(360°、180°、90°)
駆動電圧: 3.3Vまたは5V
ピン: 3本線
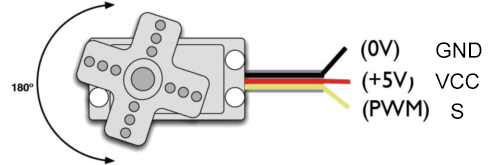
GND: グラウンド(茶色)
VCC: +5V(3.3V)電源に接続する赤いピン
S: PWM信号で制御されるオレンジ色の信号ピン
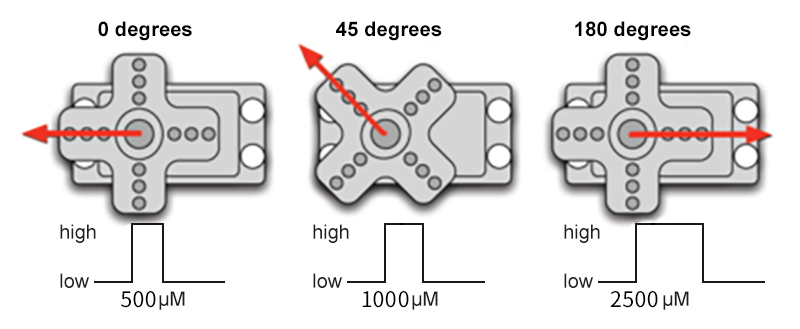
制御原理: 回転角度はPWMのデューティサイクルで制御されます。理論上、標準PWM周期は20ms(50Hz)で、パルス幅は1ms~2msの範囲に分布します。しかし実際のパルス幅は0.5ms~2.5msで、これが0°~180°に対応します。同じ信号でも、サーボのブランドによって回転角度が異なる場合があるので注意してください。
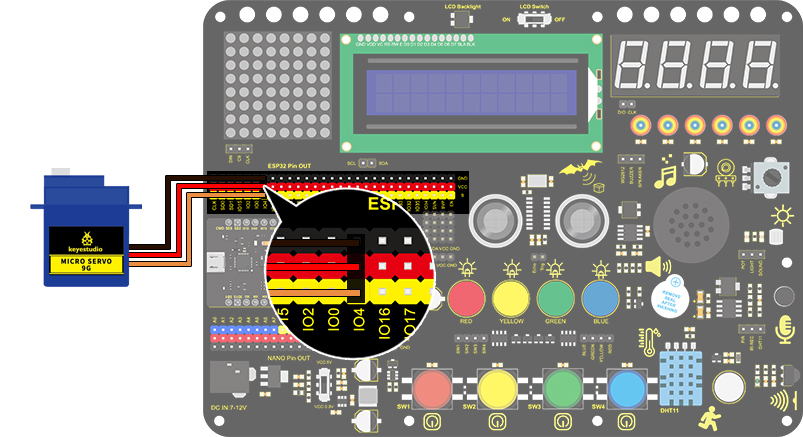
3. 配線図
4. テストコード
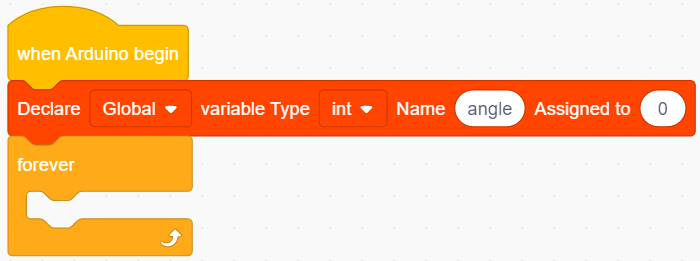
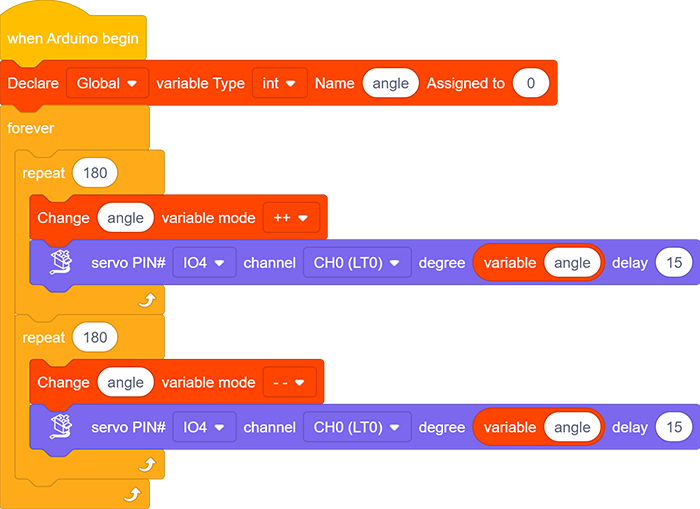
2つの基本ブロックをドラッグし、その間に「変数」ブロックを配置します。変数の型をint、名前をangle、初期値を0に設定します。
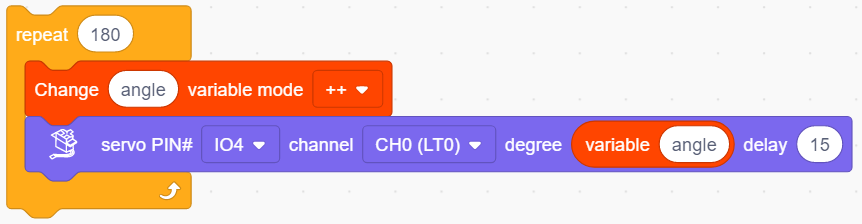
サーボが0°から180°まで徐々に回転する:
繰り返しブロックを追加し、繰り返し回数を180(180角度)に設定します。「変数を変更」と「サーボ」ブロックを繰り返しブロック内に配置します。変数名をangleにし、モードを「++」に設定します。サーボのPINをIO4に、角度を変数angleに設定します。15msの遅延を忘れずに入れてください。
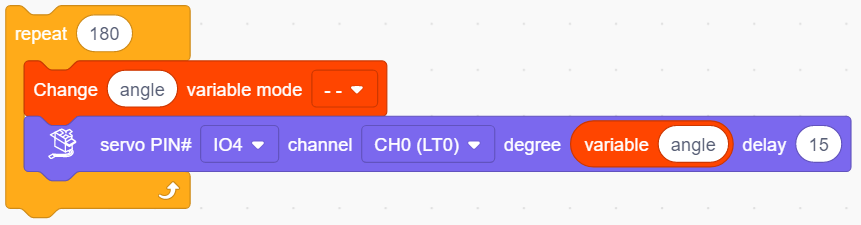
サーボが180°から0°まで徐々に回転する: ステップ2を繰り返しますが、変数のモードを「–」に設定します。
完成コード:
5. テスト結果
配線を接続しコードをアップロードすると、サーボは0°から180°へ、そして180°から0°へ回転を開始します。
6. コード説明
サーボの値を設定します。サーボのピンと回転角度はこのブロックのパラメータで制御可能です。

サーボの現在の角度を読み取ります。
