Project 28 Intelligent Gate
1. Description
The intelligent gate is an intelligent parking lot system that integrates MCU and ultrasonic sensor, which automatically controls the gate according to the distance of cars, so as to better control the car access.
When a certain distance is reached, MCU receives the signal from the sensor and estimates the distance via the signal intensity. If the car is approaching or leaving, MCU will open or close the gate via a servo.
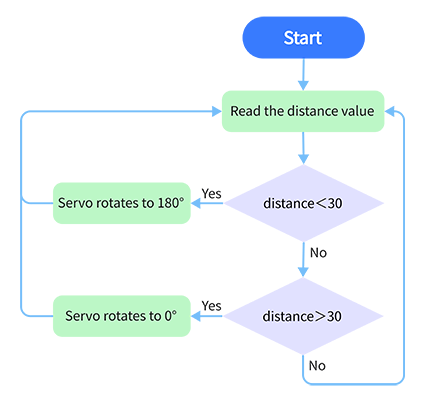
2. Flow Chart
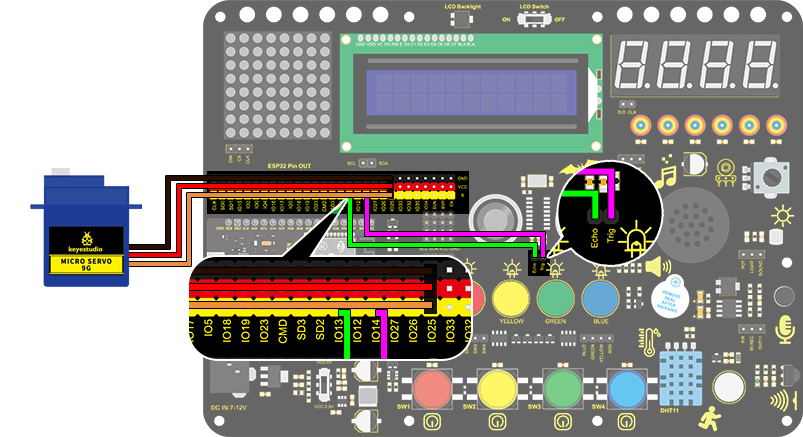
3. Wiring Diagram
4. Test Code
/*
keyestudio ESP32 Inventor Learning Kit
Project 28 Intelligent Gate
http://www.keyestudio.com
*/
#define servo_pin 25
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
//Ultrasonic ranging program
float checkdistance() { //Acquire distance
//preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
//Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
//Servo rotation program
void Set_Angle(int angle_val) //Impulse function
{
int pulsewidth = map(angle_val, 0, 180, 500, 2500); //Map Angle to pulse width
for (int i = 0; i < 10; i++) { //Output a few more pulses
digitalWrite(servo_pin, HIGH);//Set the servo interface level to high
delayMicroseconds(pulsewidth);//The number of microseconds of delayed pulse width value
digitalWrite(servo_pin, LOW);//Lower the level of servo interface
delay(20 - pulsewidth / 1000); //Add the bracket
}
}
void setup()
{
// put your setup code here, to run once:
pinMode(servo_pin,OUTPUT);
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop()
{
// put your main code here, to run repeatedly:
distance = checkdistance();
Serial.println();
if(distance < 30)
{
Set_Angle(180);
delay(5000);//Wait for 5s
}
if(distance > 30)
{
Set_Angle(0);
}
}
5. Test Result
After connecting the wiring and uploading code, the servo will rotate to 180° for 5s if the detected distance is less than 30cm. On the contrary, the servo will rotate to 0°.