プロジェクト25 超音波距離計
1. 説明
この超音波距離計は、音波を発信し、そのエコーを受信することで障害物までの距離を測定します。つまり、距離は即時の値ではなく、発信と受信の時間差を理論的に計算して得られる観測値です。
超音波は物体の形状検出、自動ドアの設置、流速や圧力の推定に利用できます。
さらに、コンピュータとの連携も可能です。そのため、測定値はArduinoボードを介してコンピュータに送信できます。
日常生活では、モーター、サーボ、LEDだけでなく、自動ナビゲーション、制御、セキュリティ監視システムなどにも広く使われています。
2. 動作原理
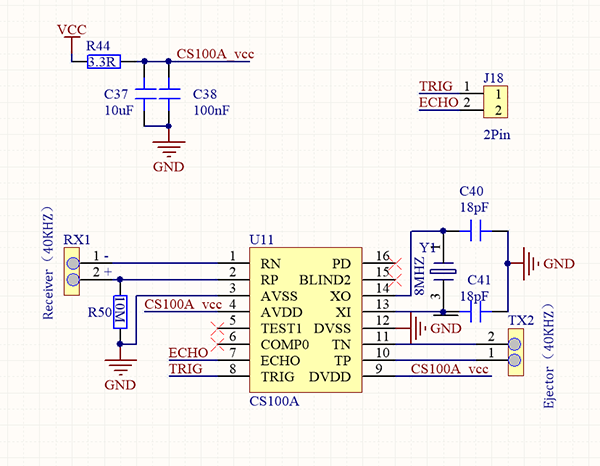
ご存知の通り、超音波は高周波の人間には聞こえない音波信号の一種です。コウモリのように、このモジュールは波の発信とエコー受信の時間差を計算して障害物までの距離を測定します。
最大距離: 3M
最小距離: 5cm
検出角度: ≤15°
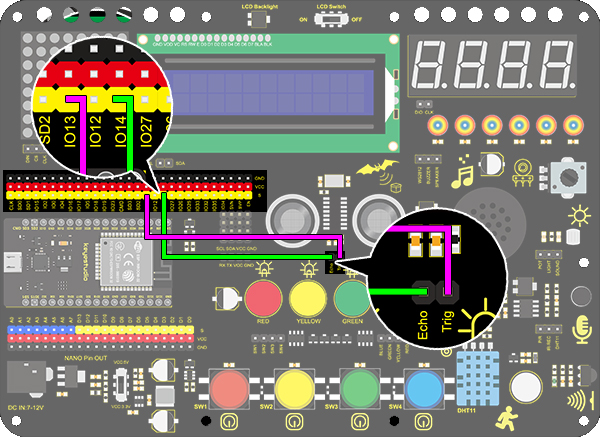
3. 配線図
4. テストコード
/*
keyestudio ESP32 Inventor Learning Kit
Project 25.1:Ultrasonic Rangefinder
http://www.keyestudio.com
*/
int distance = 0; //Define a variable to receive the diatance value
int EchoPin = 14; //Connect Echo pin to io14
int TrigPin = 13; //Connect Trig pin to io13
float checkdistance() { //Acquire the distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2); //Delay 2um
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10); //Delay 10um
digitalWrite(TrigPin, LOW);
//Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance; //Return the diatance value
}
void setup()
{
Serial.begin(9600);//Set the baud rate to 9600
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop()
{
distance = checkdistance(); //Assign the read value to "distance"
if (distance < 4 || distance >= 400) //Display "-1" if exceeding the detection range
{
distance = -1;
}
Serial.print("ditance: ");
Serial.print(distance);
Serial.println(" CM");
delay(200);
}
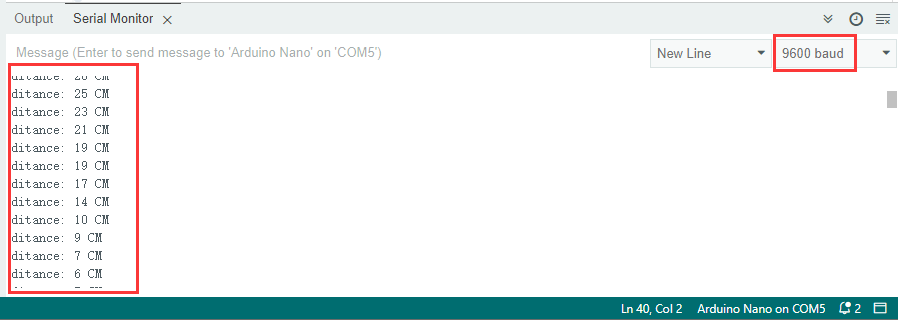
5. テスト結果
配線を接続しコードをアップロードした後、シリアルモニターを開きボーレートを9600に設定すると、シリアルポートに距離の値が表示されます。
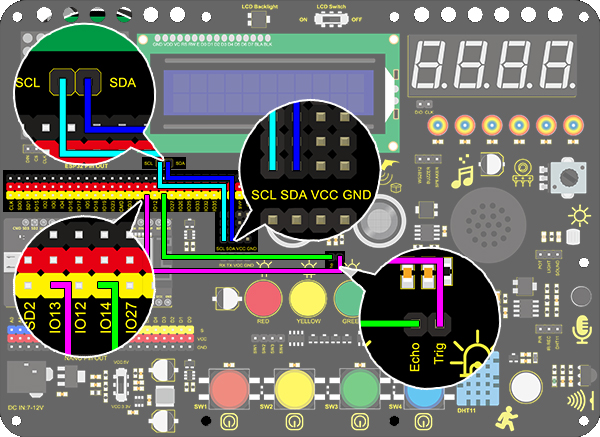
6. 知識の拡張
距離計を作ってみましょう。
LCD 1602に文字を表示します。プログラムでは(3,0)に「Keyestudio」、(0,1)に「distance:」を表示し、(9,1)に距離の値を表示します。
値が100(または10)未満の場合、3桁目(または2桁目)の残像が残るため、特定の条件を判定するために「if」文が必要です。
配線図:
コード:
/*
keyestudio ESP32 Inventor Learning Kit
Project 25.2:Ultrasonic Rangefinder
http://www.keyestudio.com
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2); //set the LCD address to 0x27 for a 16 chars and 2 line display
int distance = 0; //Define a variable to receive the diatance value
int EchoPin = 14; //Connect Echo pin to io14
int TrigPin = 13; //Connect Trig pin to io13
float checkdistance() { //Acquire the distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
void setup()
{
Serial.begin(9600);//Set the baud rate to 9600
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
lcd.init(); // initialize the lcd
// Print a message to the LCD.
lcd.backlight();
lcd.setCursor(3,0);
lcd.print("Keyestudio");
}
void loop()
{
distance = checkdistance();
if (distance < 2 || distance >= 400) //Display "-1" if exceeding the detection range
{
distance = -1;
}
if(distance < 100 && distance > 10){ //Eliminate the shadow of the third digit when the value drops to two digits
lcd.setCursor(11,1);
lcd.print(" ");
}
if(distance < 10)//Eliminate two-digit shadows when the value drops to one digit
{
lcd.setCursor(10,1);
lcd.print(" ");
}
lcd.setCursor(0,1);
lcd.print("distance:");
lcd.setCursor(9,1);
lcd.print(distance);
delay(200);
}