Project 1 LED Blink
1.説明

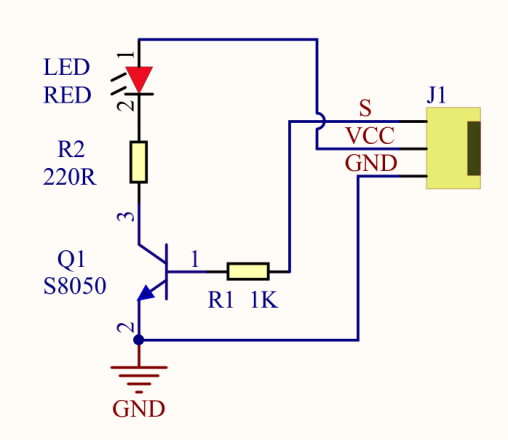
初心者や愛好家向けに、LED Blinkは基本的なプログラムです。LEDはlight emitting diodes(発光ダイオード)の略で、Ga、As、P、Nなどの化学化合物で構成されています。
テストコードの遅延時間を変えることで、LEDはさまざまな色で点滅できます。制御時には、GNDとVCCに電源を入れ、S端子が高レベルの場合はLEDが点灯し、そうでなければ消灯します。
2.仕様
制御インターフェース:デジタルポート
動作電圧:DC 3.3-5V
ピン間隔:2.54mm
LED表示色:赤
3.コンポーネント
Development Board *1 |
8833 Motor Driver *1 |
Red LED Module*1 |
|---|---|---|
|
|
|
3P F-F Dupont Wire*1 |
USB Cable*1 |
|
|
|





4.配線図
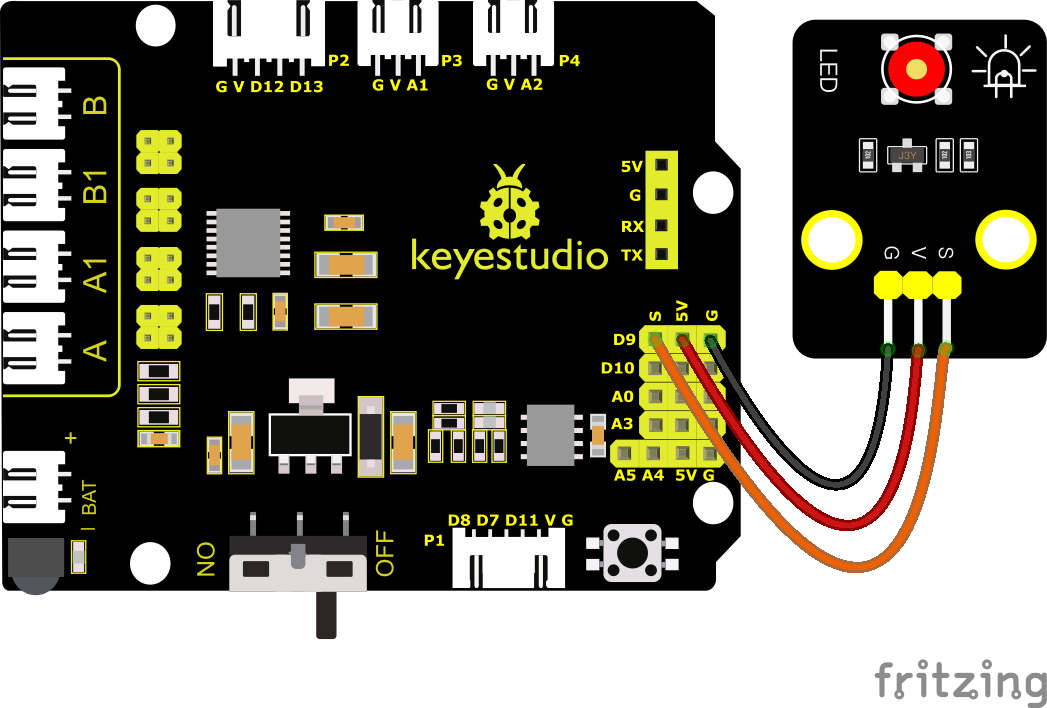
上図からわかるように、Keyestudio 8833モータードライバー拡張ボードはKeyestudio 4.0開発ボードに重ねられています。
LEDモジュールのピンG、V、Sはそれぞれ拡張ボードのG、5V、D9に接続されています。
5.テストコード
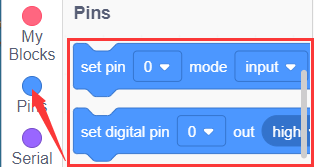
ブロックをドラッグして編集できます。以下に参考用のブロックを示します。
(1).
(2).
(3).
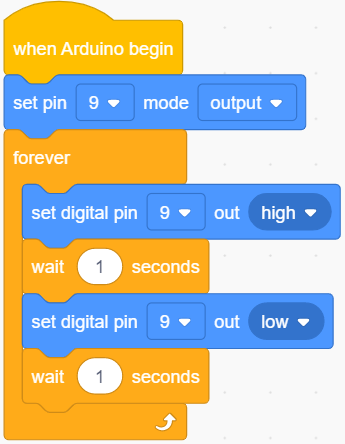
完成したテストコード
6.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、USBケーブルでコンピュータと接続してボードに電源を供給します。電源を入れると、D9に接続されたLEDが点灯と消灯を繰り返します。
7.拡張練習
次に、待機時間を変えてLEDの点滅周波数を変更してみます。
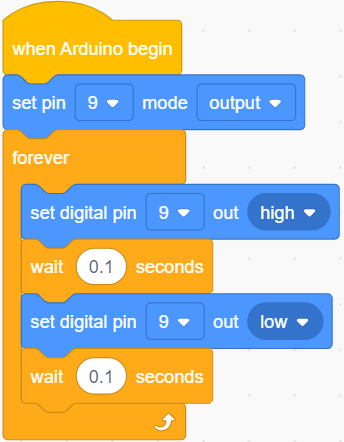
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、USBケーブルでコンピュータと接続してボードに電源を供給します。テスト結果はLEDがより速く点滅することを示しています。