プロジェクト8 モーター駆動と速度制御
1.説明
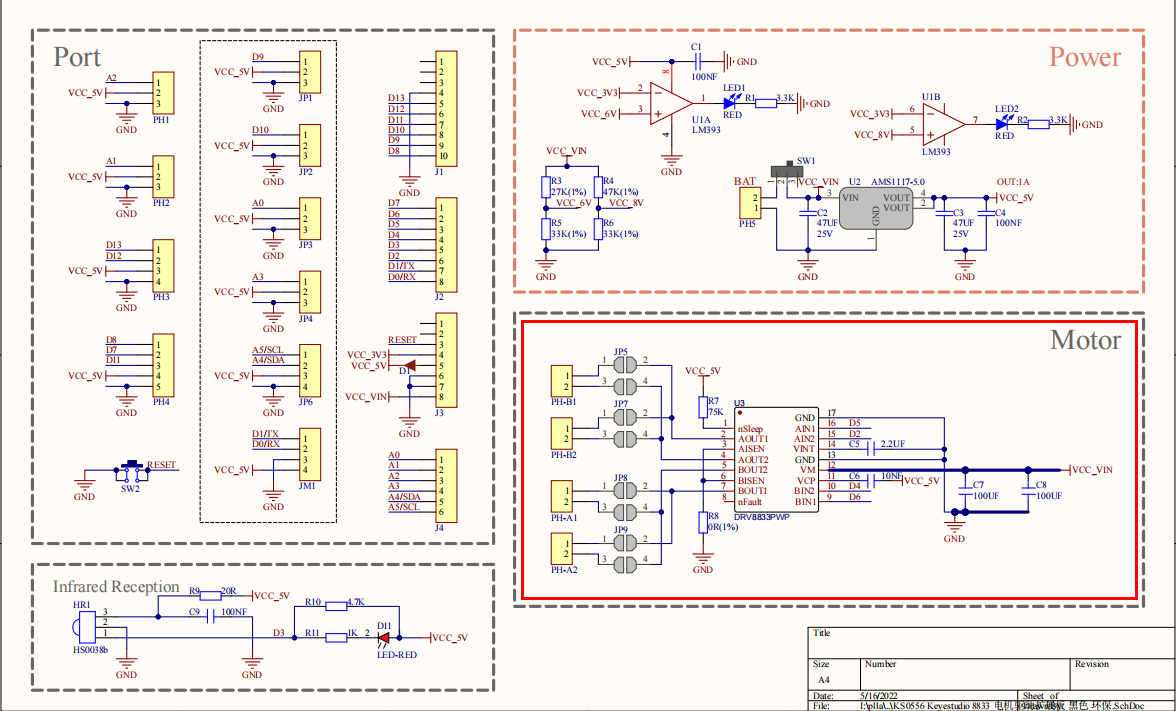
モーターを駆動する方法は多くあります。私たちの車は最も一般的に使用されているDRV8833モータードライバーチップを使用しており、これはおもちゃ、プリンターなどの統合モーターアプリケーション向けに2チャネルのブリッジ電気駆動ソリューションを提供します。
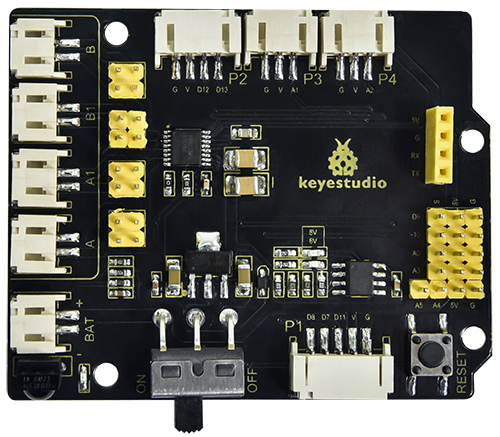
ドライバー拡張ボードを4.0開発ボードに重ねてBATに電源を入れ、DIPスイッチをON端に設定すると、外部電源が2つのボードに同時に電力を供給します。配線接続を容易にするために、ドライバー拡張ボードには逆接続防止ポート(PH2.0-2P-3P-4P-5P)が付いています。モーター、電源、センサーモジュールを直接ドライバー拡張ボードに接続できます。
ドライバー拡張ボードのBluetoothインターフェースはDX-BT24 5.1 Bluetoothモジュールと完全互換です。Bluetoothモジュールを接続する際は、対応するインターフェースに差し込むだけで済みます。同時に、2.54ピッチのピン列を使ってドライバー拡張ボード上の未使用のデジタルおよびアナログポートを引き出しており、他のセンサーを追加したり拡張実験を行ったりすることが可能です。
拡張ボードは4つのDCモーターに接続できます。ジャンパーキャップがデフォルトで接続されている場合、ポートAとA1、BとB1のモーターは並列接続され、同じ動作パターンになります。8つのジャンパーキャップで4つのモーターインターフェースの回転方向を制御できます。
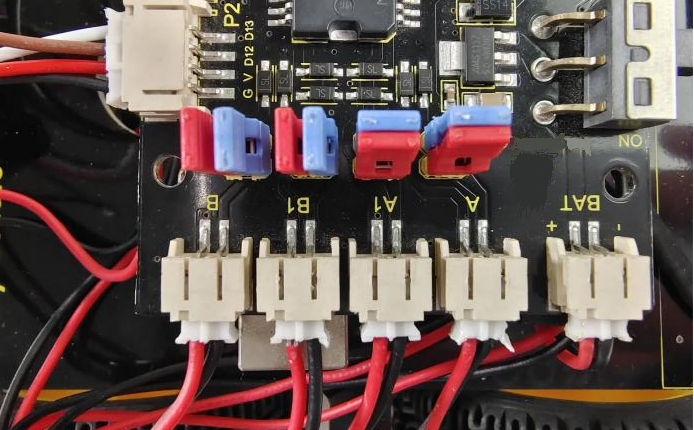
例えば、M1モーターのB1前の2つのジャンパーキャップを横方向接続から縦方向接続に変更すると、M1モーターの回転方向は元の回転方向と逆になります。
2.仕様
ロジック入力電圧:DC 5V
駆動入力電圧:DC 6-9 V
ロジック動作電流:<36mA
駆動動作電流:<2A
最大消費電力:25W(T=75℃)
制御信号入力レベル:高レベルは2.3V<Vin<5V、低レベルは-0.3V<Vin<1.5V
動作温度:-25+130℃
3.Keyestudio 8833 モータードライバー拡張ボード
動作原理
4つのモーターは同じ側の並列接続モードを使用し、2つのモーターグループとして扱います。配線図のように、BとB1が1グループ、AとA1がもう1グループです。
同じグループのモーターは同じ方向に回転する必要があります。異なる場合は、端子横の対応するジャンパーキャップを調整して方向を変更してください。
下図のように、AとA1の方向が異なる場合は、ジャンパーキャップの方向を調整して同じグループのモーターの動作方向を一致させます。
上図から、Aモーターの方向ピンはD4、速度ピンはD6であることがわかります。D2はBモーターの方向ピン、D6は速度ピンです。
PWMでロボットカーを駆動します。PWM値は0-255の範囲です。方向をHIGHに設定すると、PWMの数値が小さいほどモーターの回転が速くなります。
| D2 | D5(PWM) | Bモーター(左) | D4 | D6(PWM) | Aモーター(右) | |
| 前進 | HIGH | 255-200 | 時計回り回転 | HIGH | 255-200 | 時計回り回転 |
| 後退 | LOW | 200 | 反時計回り回転 | LOW | 200 | 反時計回り回転 |
| 左折 | HIGH | 255-200 | 時計回り回転 | LOW | 200 | 反時計回り回転 |
| 右折 | LOW | 200 | 反時計回り回転 | HIGH | 255-200 | 時計回り回転 |
Development Board *1 |
8833 Motor Driver *1 |
USB Cable*1 |
|---|---|---|
|
|
|
18650 Battery Holder*1 |
Motor*4 |
18650 Battery *2(自己準備) |
|
|
|





5.配線図
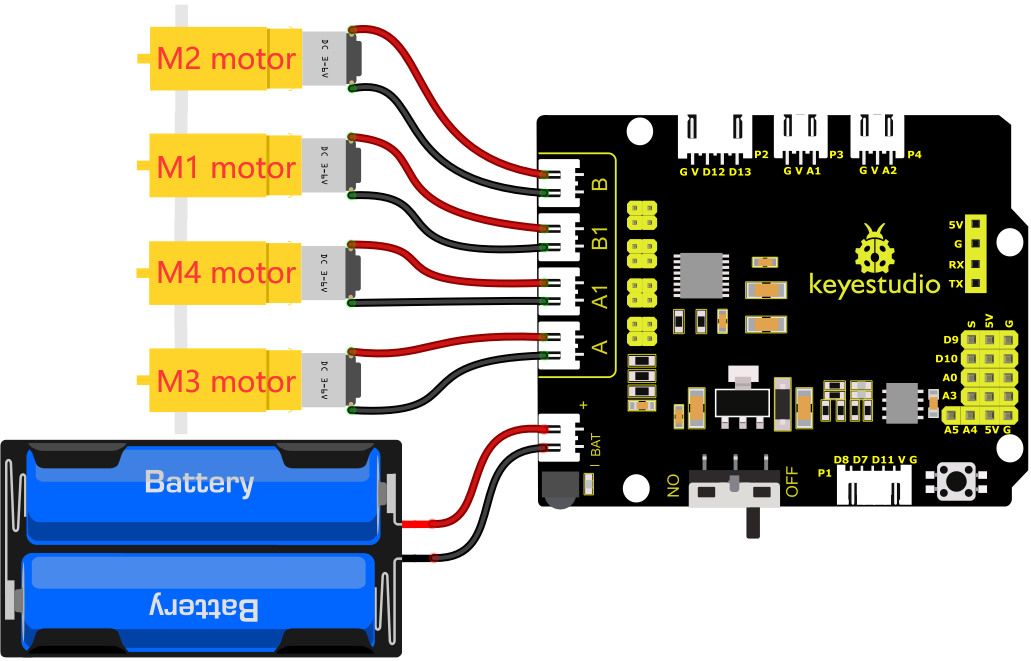
電源をBATポートに接続します。
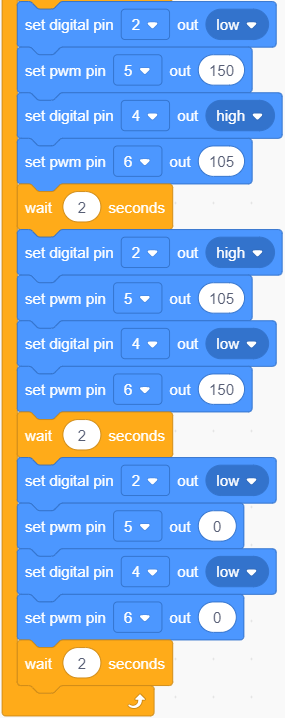
6.テストコード
ブロックをドラッグして編集できます。以下のブロックは参考用です。
(1).
(2).
(3).
完成テストコード


7.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、外部電源の電源を入れてDIPスイッチをONにすると、車は2秒間前進し、2秒間後退し、2秒間左折し、2秒間右折し、2秒間停止します。
8.コード説明
PWMでモーターの速度を調整します。同様に接続してください。
完成テストコード

コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、外部電源の電源を入れてDIPスイッチをONにすると、モーターの速度がかなり遅くなることがわかります。
注意: バッテリー残量が低いとモーターの速度が遅くなります。