Project 11 ライントラッキングスマートカー
1.説明
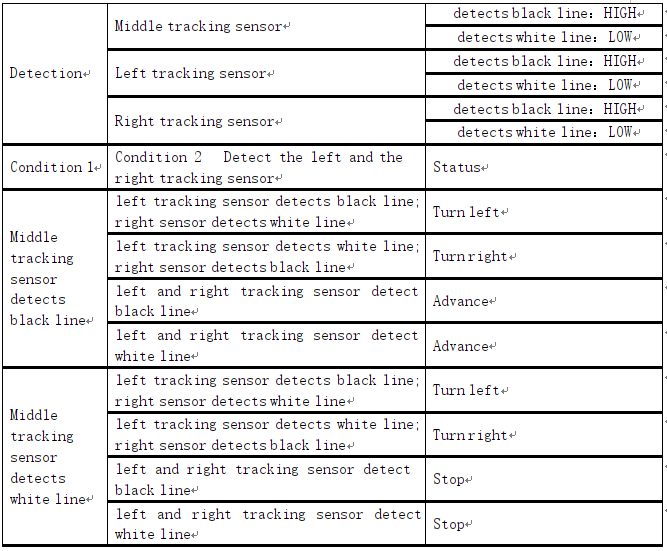
ライントラッキングセンサーの動作原理に基づき、ライントラッキングスマートカーを作成します。
このプロジェクトでは、スマートカーの底部に黒い線があるかどうかをライントラッキングセンサーで検出し、その検出結果に応じて2つのモーターグループの回転を制御し、スマートカーが黒い線に沿って走行するように制御します。
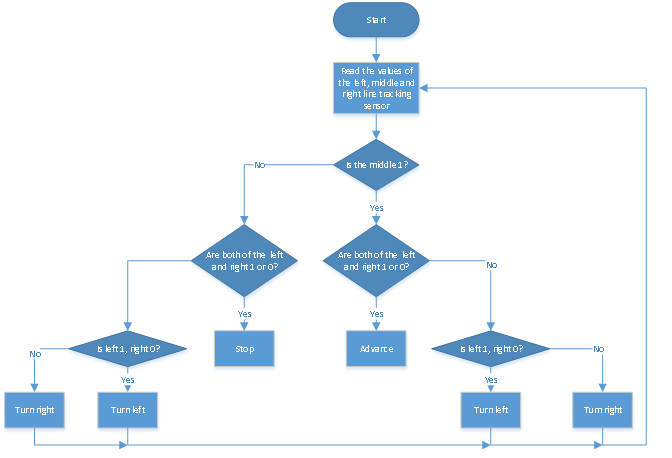
2.フローチャート
3.配線図
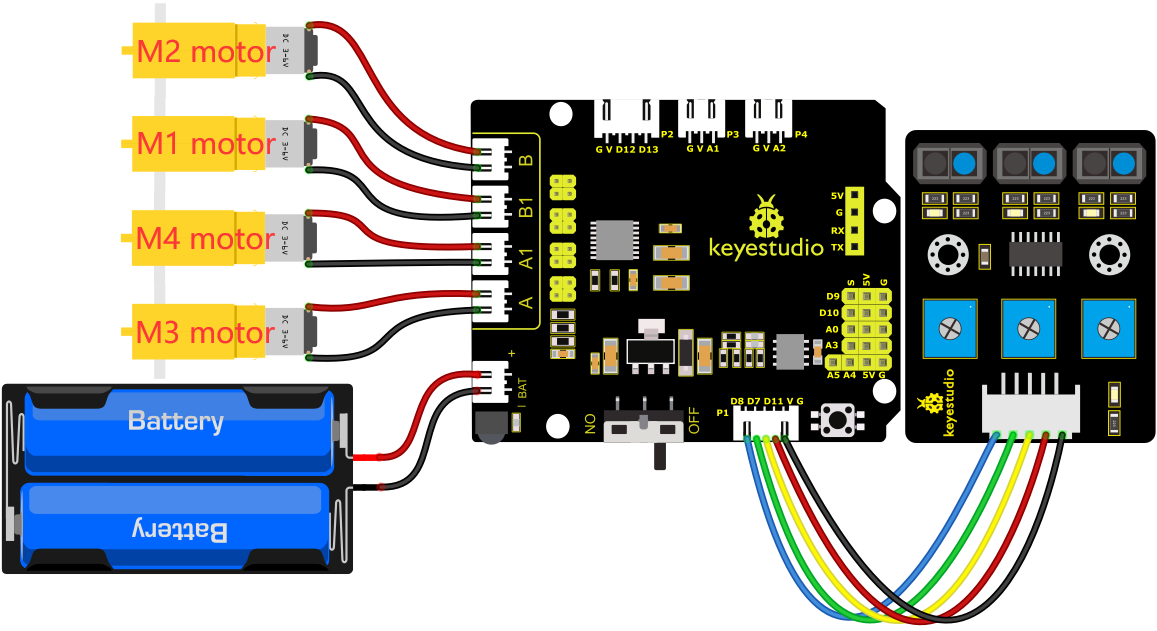
ライントラッキングセンサーのG、V、S1、S2、S3はセンサー拡張ボードのG(GND)、V(VCC)、D11、D7、D8に接続します。
電源はBATポートに接続します。
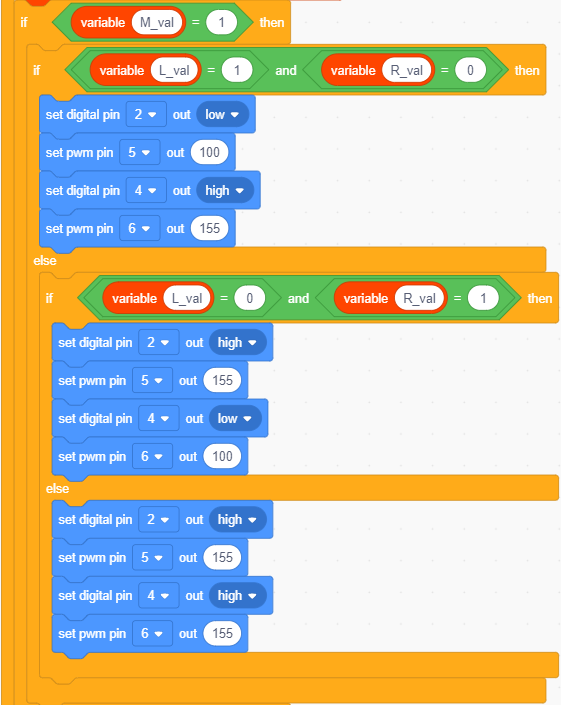
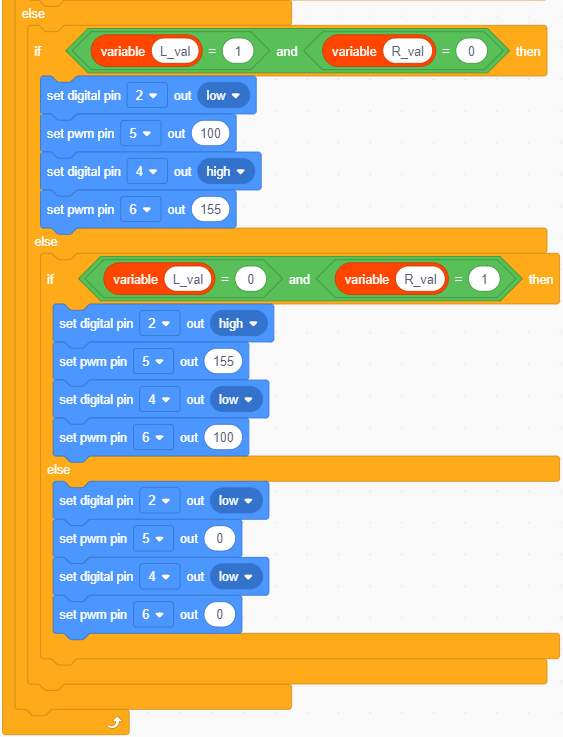
4.テストコード
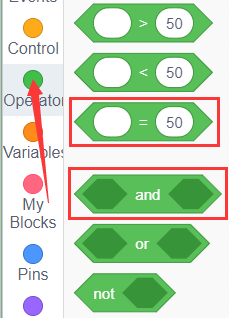
ブロックをドラッグして編集できます。以下のブロックは参考用です。
(1).
(2).
(3).
(4).
(5).
完成テストコード

5.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、外部電源を入れてからDIPスイッチをONにします。するとスマートカーがラインに沿って走行します。