Project 13 超音波障害物回避スマートカー

1.説明
このプロジェクトでは、超音波障害物回避スマートカーを作成します。超音波センサーを使って障害物までの距離を検出し、その情報をもとにサーボを制御して回転させ、車を動かします。同時に、8×16 LEDボードに対応する状態パターンを表示します。
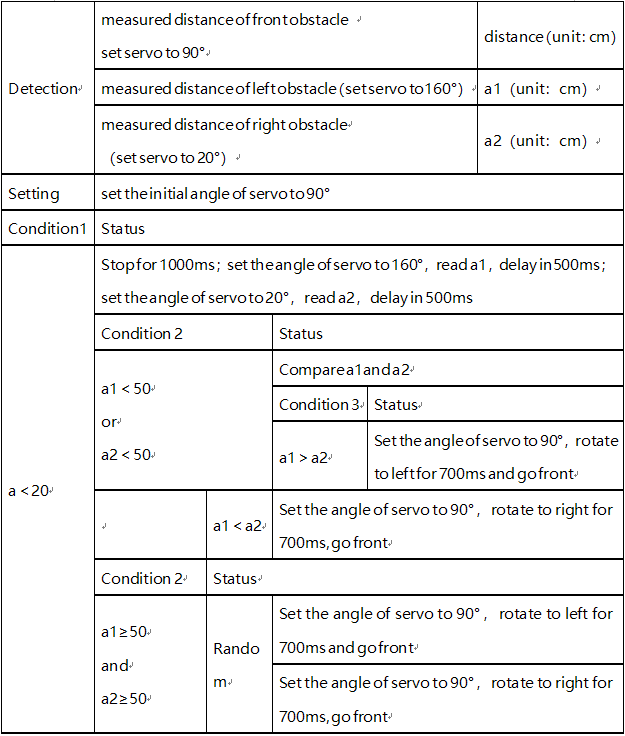
2.フローチャート
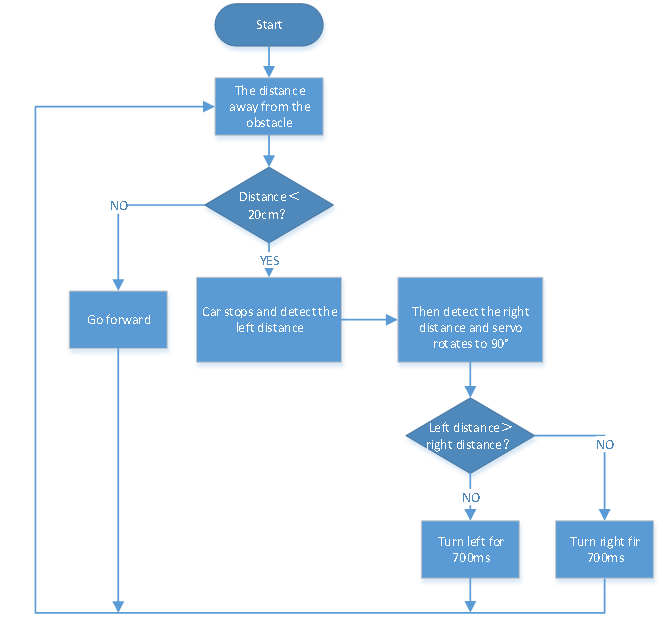
超音波障害物回避スマートカーの具体的なロジックは以下の通りです:

3.配線図
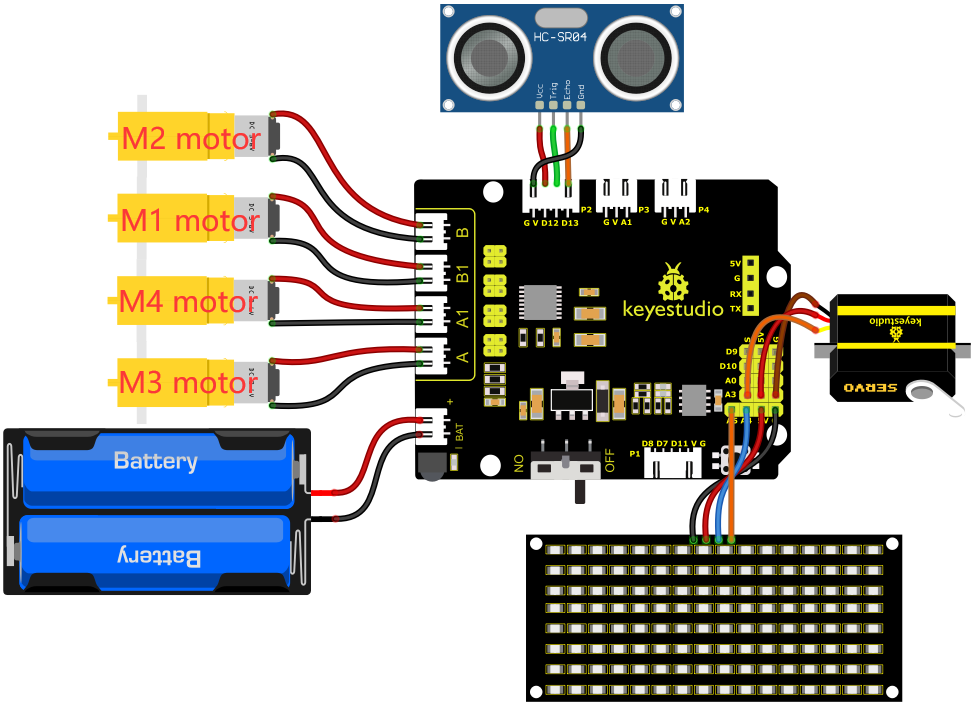
1). 8×8 LEDボードモジュールのGND、VCC、SDA、SCLは拡張ボードのG(GND)、V(VCC)、A4、A5に接続します。
2). 超音波センサーのVCC、Trig、Echo、Gndはそれぞれ5V(V)、D12(S)、D13(S)、Gnd(G)に接続します。
3). サーボはG、V、A3に接続します。茶色の線はGnd(G)、赤色の線は5V(V)、オレンジ色の線はA3に接続します。
4). 電源はBATポートに接続します。
4.テストコード
コードを書く前に、超音波センサー、8×16 LEDボード、サーボのライブラリファイルをインポートする必要があります。具体的な手順は以下の通りです:
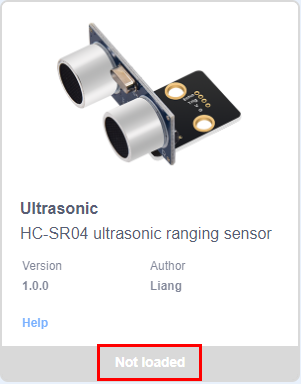
センサー/モジュール/コンポーネントの拡張ライブラリ画面に入るには  をクリックし、「Ultrasonic」センサー
をクリックし、「Ultrasonic」センサー 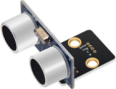 を検索してクリックします。これにより、「Not loaded」が「loaded」に変わり、「Ultrasonic」センサーが正常に追加されたことを示します。
を検索してクリックします。これにより、「Not loaded」が「loaded」に変わり、「Ultrasonic」センサーが正常に追加されたことを示します。

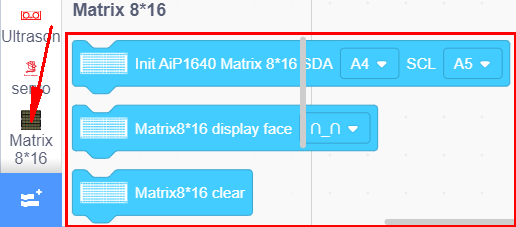
 をクリックしてコードエディタ画面に戻ると、追加された「Ultrasonic」センサー、「Matrix 8×16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
をクリックしてコードエディタ画面に戻ると、追加された「Ultrasonic」センサー、「Matrix 8×16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
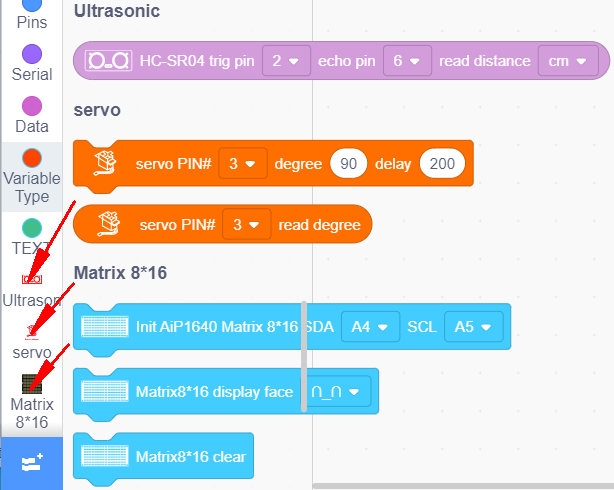
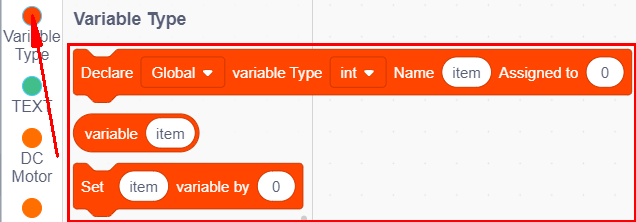
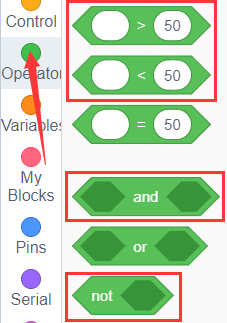
ブロックをドラッグして編集できます。以下のブロックは参考用です。
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
(10).
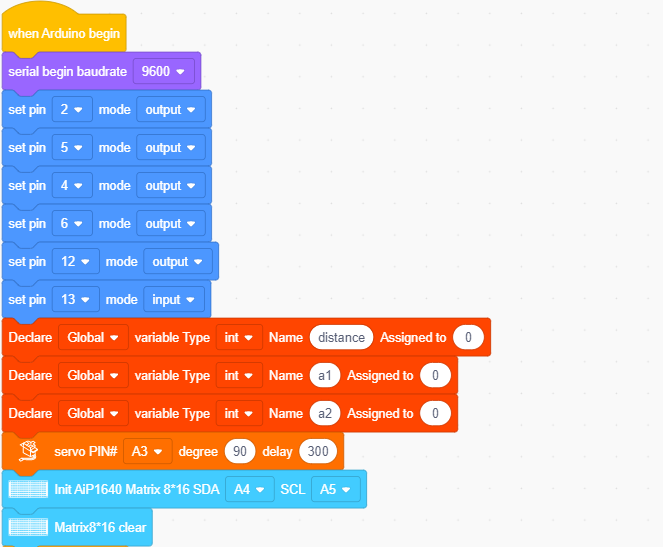
完成したテストコード
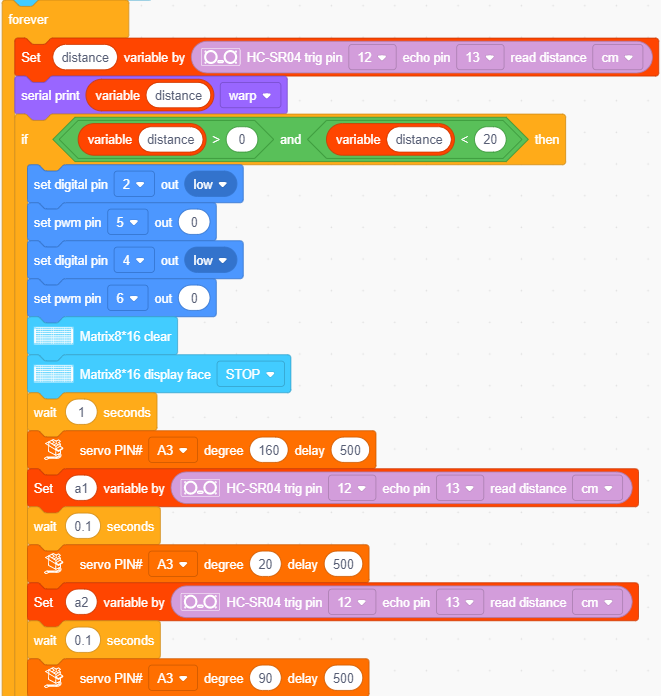

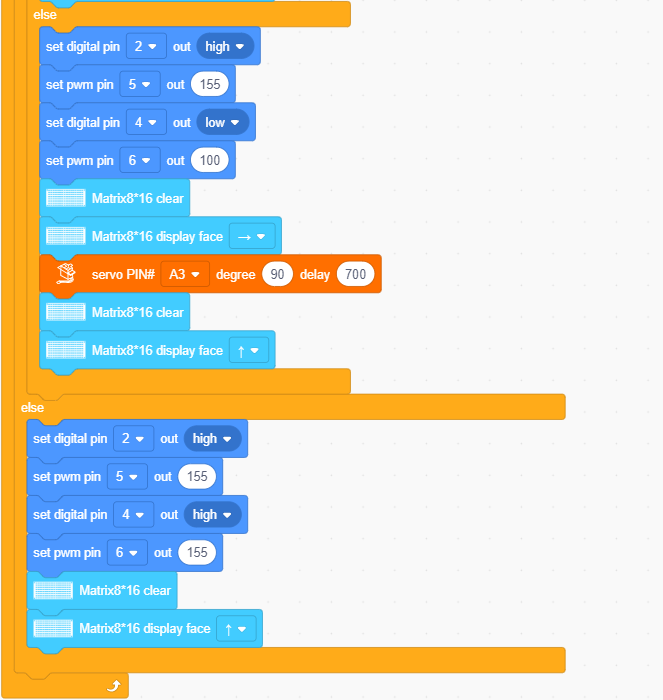
5.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、外部電源を入れてDIPスイッチをONにします。
スマートカーは前進し、自動的に障害物を回避します。前方に道がない場合、サーボが超音波センサーを駆動して左、中、右の距離をスキャンし、空いている側に車が旋回します。同時に、8×16 LEDボードに対応する状態パターンが表示されます。