Project 17 多機能 Bluetooth スマートカー

1.説明
これまでのプロジェクトでは、車は単一の機能のみを実行していました。しかし、このレッスンでは、Bluetoothを介してすべての機能を統合します。
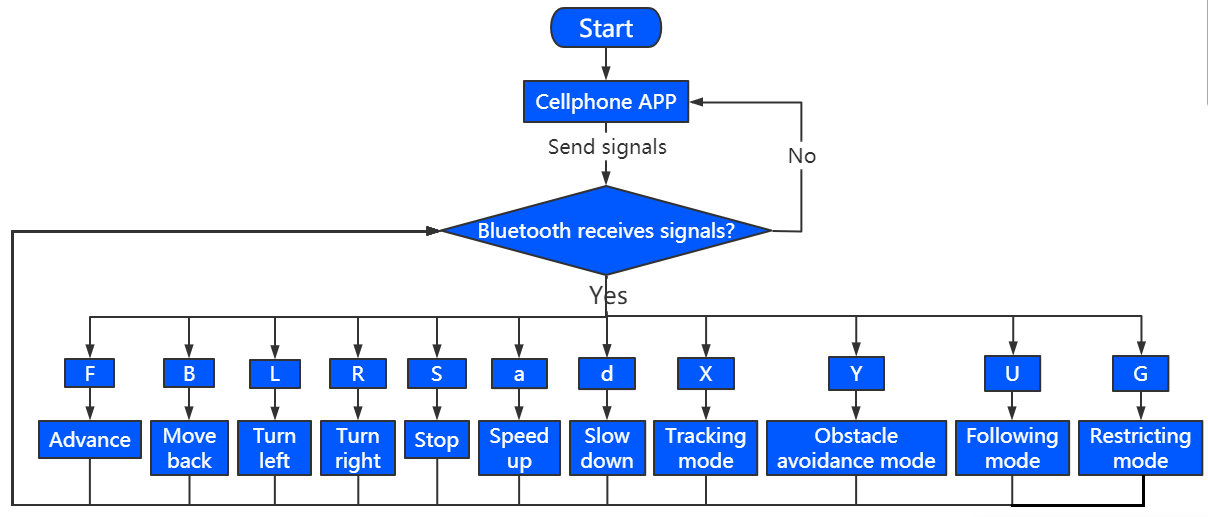
2.フローチャート
3.配線図
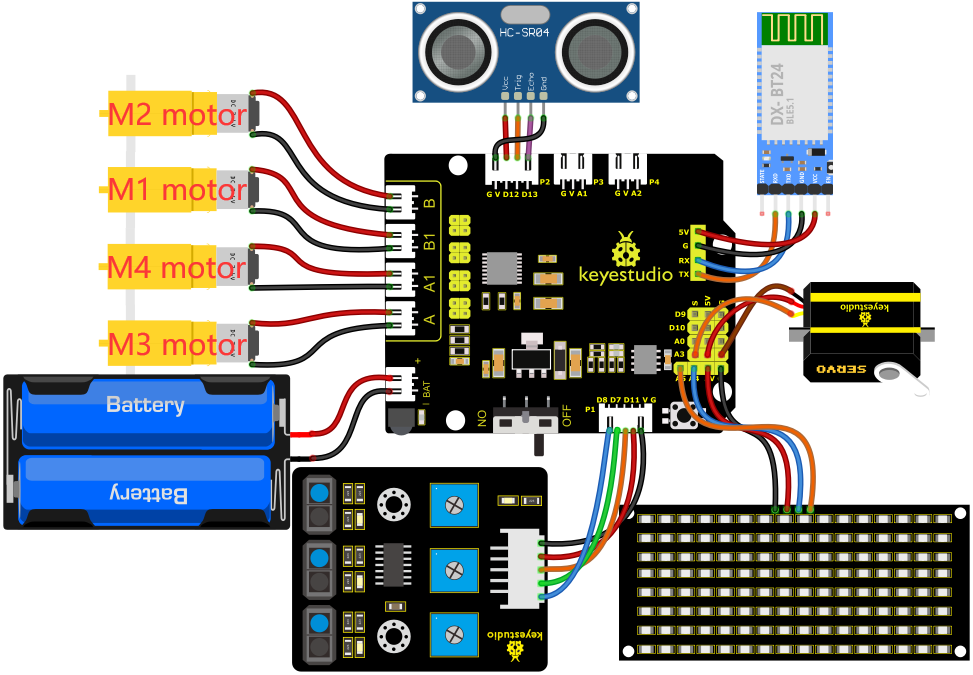
1). 8*8 LEDボードのGND、VCC、SDA、SCLは拡張ボードのG(GND)、V(VCC)、A4、A5に接続します。
2). BluetoothモジュールのRXD、TXD、GND、VCCはそれぞれ8833モータードライバー拡張ボードのTX、RX、G、5Vに接続します。BluetoothモジュールのSTATEおよびBRKピンは接続不要です。
3). サーボはG、V、A3に接続します。茶色の線はGnd(G)に、赤色の線は5V(V)に、オレンジ色の線はA3に接続します。
4). ライントラッキングセンサーのG、V、S1、S2、S3はセンサー拡張ボードのG(GND)、V(VCC)、D11、D7、D8に接続します。
5). 超音波センサーのVCC、Trig、Echo、Gndはそれぞれ5V(V)、D12(S)、D13(S)、Gnd(G)に接続します。
6). 電源はBATポートに接続します。
4.テストコード
コードを書く前に、超音波センサー、8x16 LEDボード、サーボのライブラリファイルをインポートする必要があります。具体的な手順は以下の通りです:
 をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Ultrasonic」センサー
をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Ultrasonic」センサー を検索してクリックします。これにより「Not loaded」が「loaded」に変わり、「Ultrasonic」センサーが正常に追加されたことを示します。
を検索してクリックします。これにより「Not loaded」が「loaded」に変わり、「Ultrasonic」センサーが正常に追加されたことを示します。

 をクリックしてコードエディタ画面に戻ると、追加された「Ultrasonic」センサー、「Matrix 8*16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
をクリックしてコードエディタ画面に戻ると、追加された「Ultrasonic」センサー、「Matrix 8*16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
完成したテストコード
注意: テストコードをアップロードする前にBluetoothモジュールを取り外す必要があります。そうしないとコードのアップロードに失敗します。コードのアップロードが成功した後にBluetoothモジュールを接続してください。
5.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、外部電源を入れてDIPスイッチをONにします。
BluetoothモジュールがAPPに接続され、モバイルAPPがBluetoothに正常に接続されると、スマートカーはモバイルAPPで制御可能になります。モバイルAPPの対応するボタンを押すことで、対応する機能を実現できます。