Project 14 IRリモコン制御スマートカー
1.説明
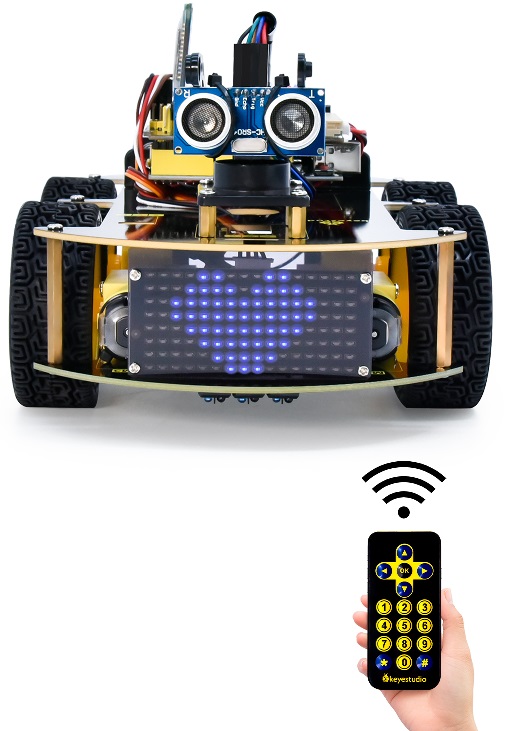
このプロジェクトでは、IRリモコン制御のスマートカーを作成し、IRリモコンのボタンを押して車を動かします。
2.フローチャート
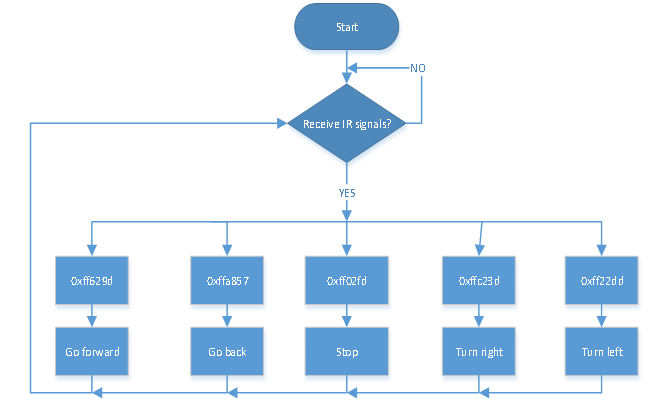
IRリモコン制御スマートカーの具体的なロジックは以下の通りです:
初期設定 |
LEDボードにスマイルフェイスを表示 |
|
|---|---|---|
リモコン |
キー値 |
キー状態 |
|
FF629D |
前進 8*8 LEDボードに前進アイコンを表示 |
|
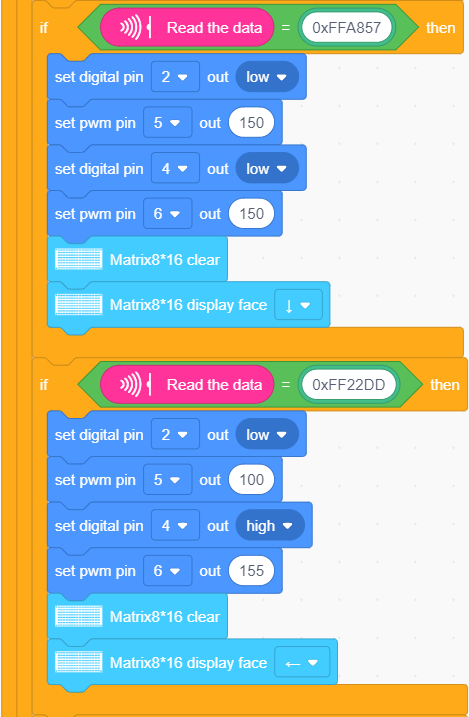
FFA857 |
後退 8*8 LEDボードに後退アイコンを表示 |
|
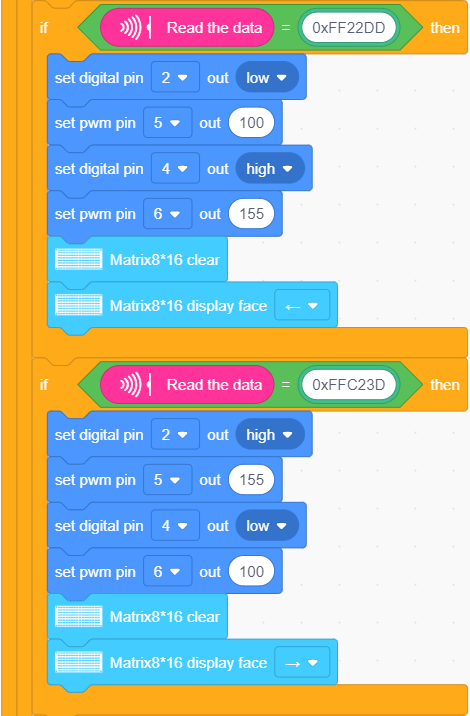
FF22DD |
左回転 8*8 LEDボードに左向きアイコンを表示 |
|
FFC23D |
右回転 8*8 LEDボードに右向きアイコンを表示 |
|
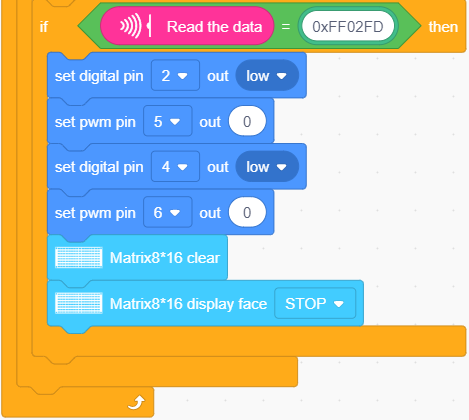
FF02FD |
停止 8*8 LEDボードに「STOP」を表示 |





3.配線図
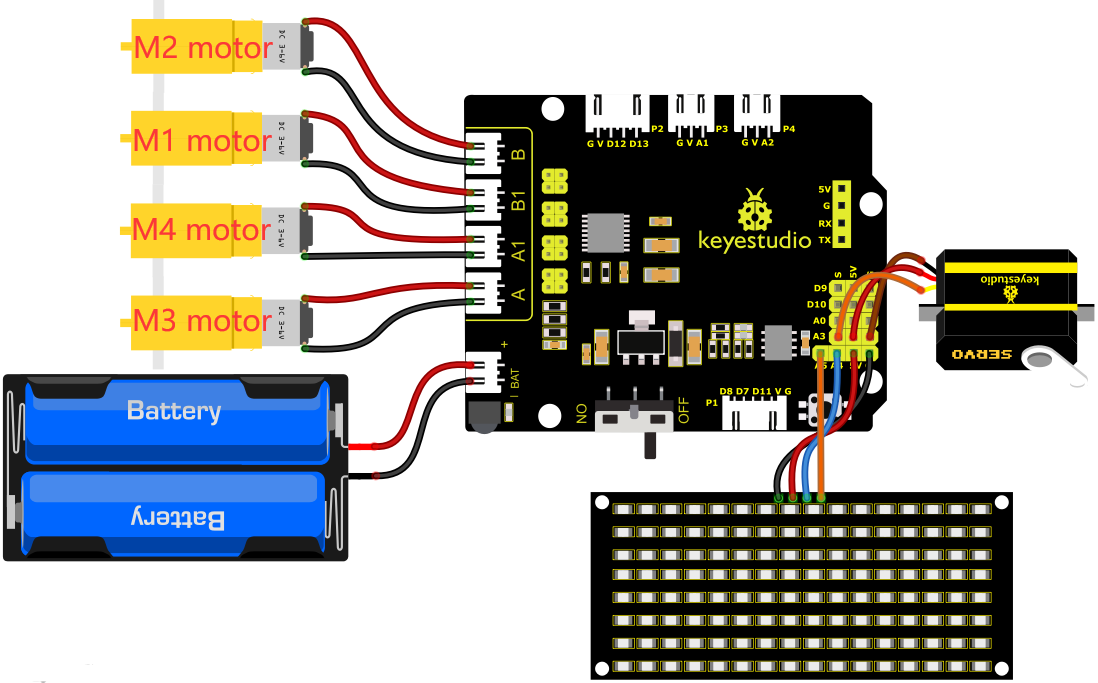
1). 8*8 LEDボードモジュールのGND、VCC、SDA、SCLは拡張ボードのG(GND)、V(VCC)、A4、A5に接続します。
2). IR受信機は8833モータードライバー拡張ボードに統合されているため、追加の配線は不要です。8833ボード上のIR受信機のピンはそれぞれG(GND)、V(VCC)、D3です。
3). サーボはG、V、A3に接続します。茶色の線はGnd(G)に、赤色の線は5V(V)に、オレンジ色の線はA3に接続します。
4). 電源はBATポートに接続します。
4.テストコード
ご注意:ソフトウェアデモに表示されている赤外線モジュールはすでに拡張ボードに統合されており、別途供給されていません。そのため、下記画像に示されたモジュールは製品内に含まれていません。
コードを書く前に、超音波センサー、8x16 LEDボード、サーボのライブラリファイルをインポートする必要があります。具体的な手順は以下の通りです:
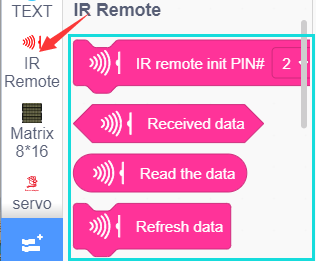
 をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「ir remote」センサーを検索してクリックします。これにより「Not loaded」が「loaded」に変わり、「ir remote」センサーが正常に追加されたことを示します。
をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「ir remote」センサーを検索してクリックします。これにより「Not loaded」が「loaded」に変わり、「ir remote」センサーが正常に追加されたことを示します。
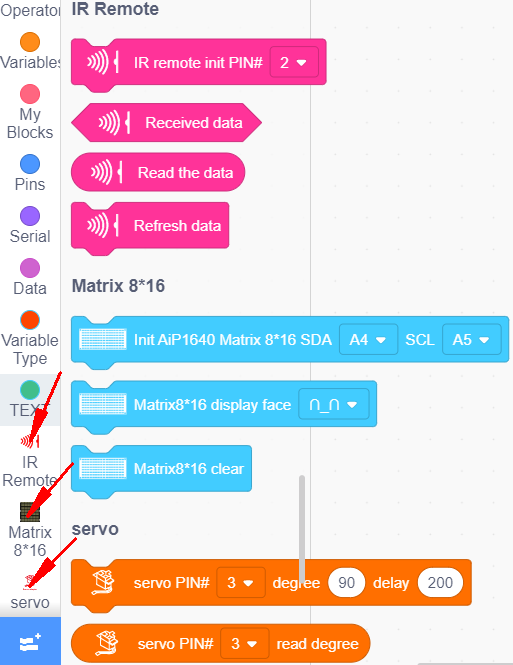
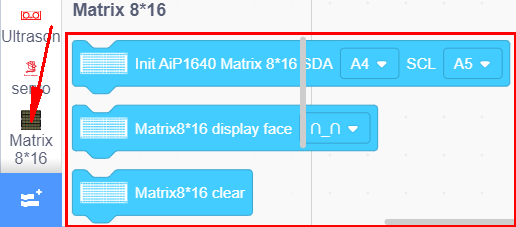
 をクリックしてコードエディタ画面に戻ると、追加された「ir remote」センサー、「Matrix 8*16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
をクリックしてコードエディタ画面に戻ると、追加された「ir remote」センサー、「Matrix 8*16 Aip1640」モジュール、「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
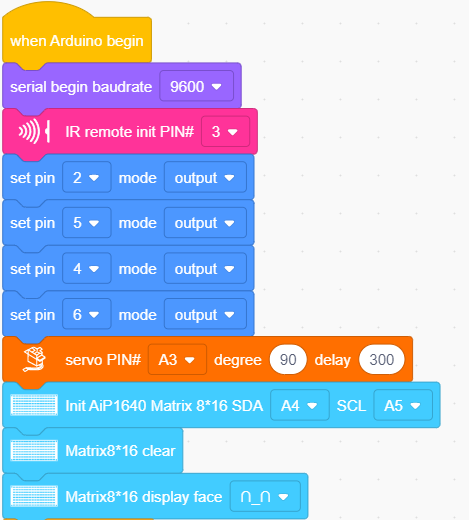
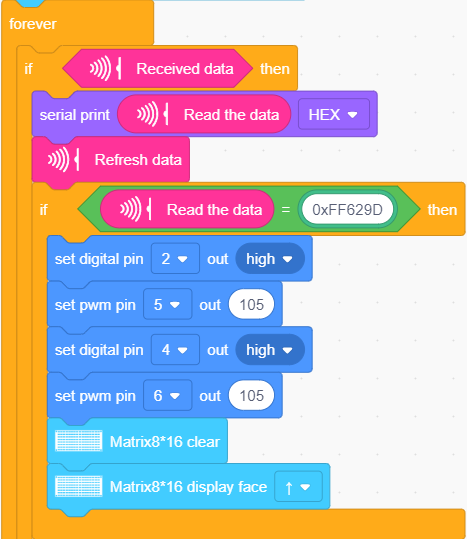
ブロックをドラッグして編集できます。以下のブロックは参考用です。
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
完成したテストコード
5.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、外部電源を入れてからDIPスイッチをONにします。これでIRリモコンを使って車を動かすことができ、8X16 LEDボードに対応する状態パターンが表示されます。