Project 4 サーボ制御
1. 説明

サーボモーターは位置制御用の回転アクチュエーターです。主にハウジング、回路基板、コアレスモーター、ギア、位置センサーで構成されています。動作原理は、サーボがMCUや受信機から送られた信号を受け取り、周期20ms、幅1.5msの基準信号を生成し、取得した直流バイアス電圧とポテンショメーターの電圧を比較して電圧差を出力することです。
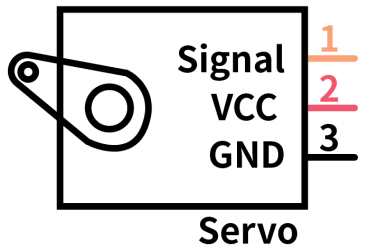
一般的に、サーボには茶色、赤、オレンジの3本の線があります。茶色の線はグランド、赤は正極線、オレンジは信号線です。
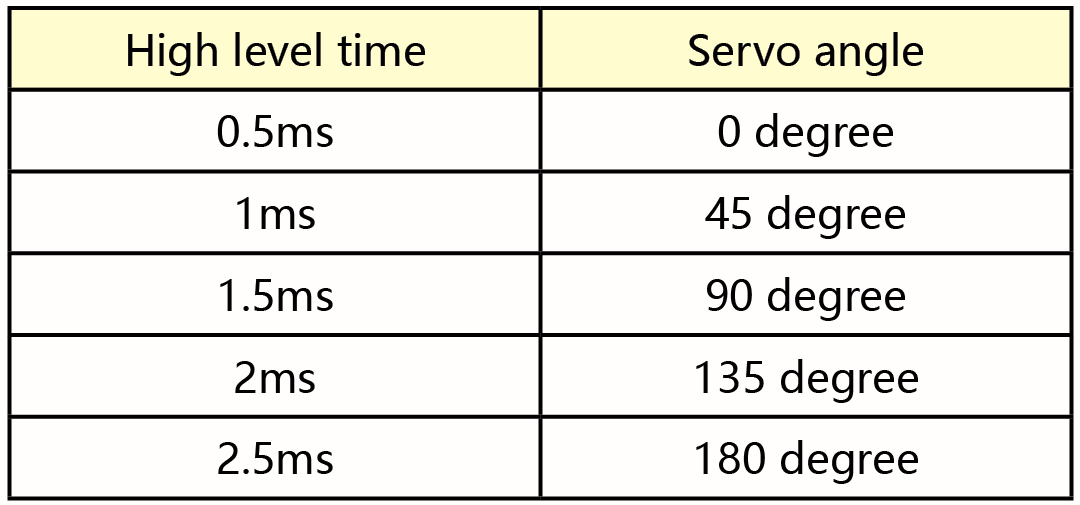
サーボモーターの回転角度はPWM(パルス幅変調)信号のデューティ比を調整することで制御されます。PWM信号の標準周期は20ms(50Hz)です。理論上、幅は1ms〜2msの範囲ですが、実際には0.5ms〜2.5msの範囲です。この幅は0°から180°までの回転角度に対応します。ただし、ブランドによっては同じ信号でも回転角度が異なる場合があります。
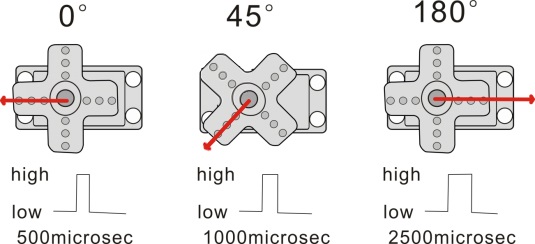
対応するサーボ角度は以下の通りです:
2. 仕様
動作電圧:DC 4.8V 〜 6V
動作角度範囲:約180°(500 → 2500 μsec時)
パルス幅範囲:500 → 2500 μsec
無負荷速度:0.12 ± 0.01秒 / 60(DC 4.8V) 0.1 ± 0.01秒 / 60(DC 6V)
無負荷電流:200 ± 20mA(DC 4.8V) 220 ± 20mA(DC 6V)
停止トルク:1.3 ± 0.01kg·cm(DC 4.8V) 1.5 ± 0.1kg·cm(DC 6V)
停止電流:≦ 850mA(DC 4.8V) ≦ 1000mA(DC 6V)
待機電流:3 ± 1mA(DC 4.8V) 4 ± 1mA(DC 6V)
3. コンポーネント
開発ボード *1 |
8833 モータードライバー *1 |
サーボ*1 |
|---|---|---|
|
|
|
18650 バッテリーホルダー*1 |
USB ケーブル*1 |
18650 バッテリー*2(自己準備) |
|
|
|






4. 配線図
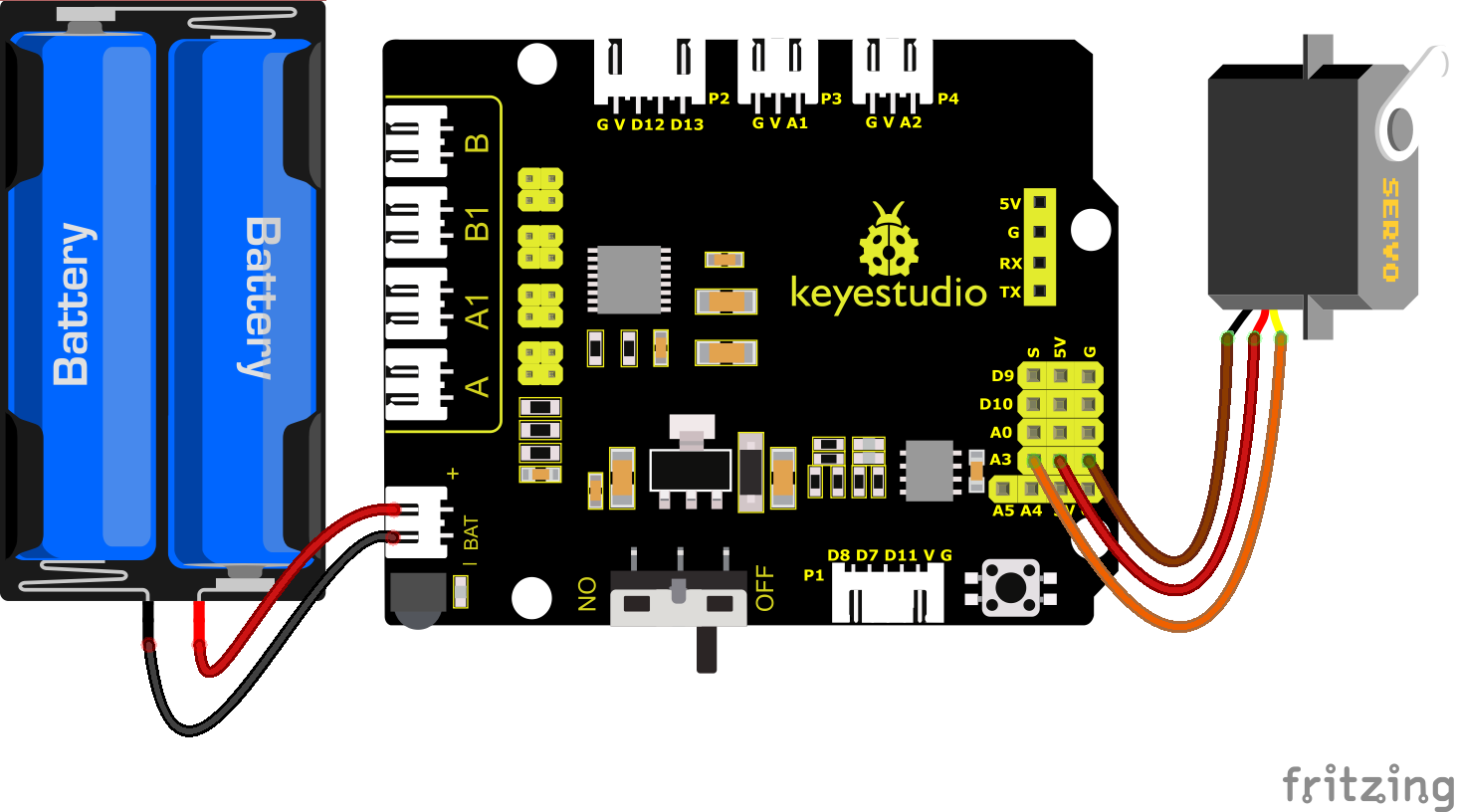
配線の注意:サーボはG(GND)、V(VCC)、A3に接続します。サーボの茶色線はGnd(G)に、赤線は5V(V)に、オレンジ線はA3に接続します。
サーボは駆動電流の要求が高いため、外部電源に接続する必要があります。一般的に開発ボードの電流は十分ではありません。外部電源を接続しないと、開発ボードが焼損する恐れがあります。
5. テストコード
コードを書く前に、サーボライブラリファイルをインポートする必要があります。具体的な手順は以下の通りです:
 をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Servo」を探します。
をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Servo」を探します。

コンポーネントをクリックします。これで「Not Loaded」が「loaded」に変わり、「Servo」コンポーネントが正常に追加されたことを示します。


 をクリックしてコードエディタに戻ると、モジュールエリアに「Servo」コンポーネントの指令ブロックが追加されています。
をクリックしてコードエディタに戻ると、モジュールエリアに「Servo」コンポーネントの指令ブロックが追加されています。

ブロックをドラッグして編集できます。以下のブロックは参考用です。
(1). 
(2). 
(3). 
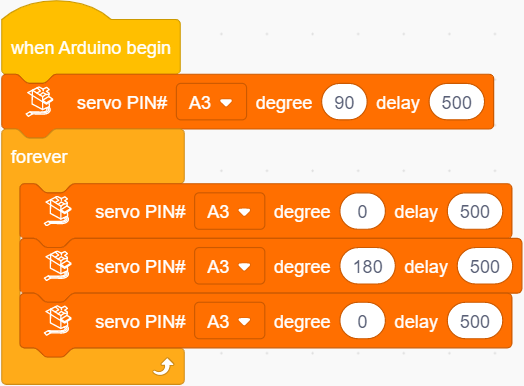
完成テストコード
6. テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、外部電源を入れます。電源を入れたらディップスイッチを「ON」側に切り替えると、サーボが0°から180°の範囲で揺れ動きます。