Project 15 Bluetooth Control Smart Car

1.説明
Bluetoothの基本知識を学びました。このレッスンでは、Bluetooth制御のスマートカーを作成します。このプロジェクトでは、携帯電話を送信機(ホスト)として、BT24 Bluetoothモジュールに接続されたスマートカー(スレーブ)を受信機として扱い、携帯アプリを使ってBluetooth経由でスマートカーを制御することを目的としています。
2.APP制御ボタン
キー |
機能 |
|---|---|
|
DX-BT24 5.1 Bluetoothモジュールとペアリング |
|
Bluetooth切断 |


制御文字 |
機能 |
|
|---|---|---|
|
押す: F |
ボタンを押すと車が前進; |
|
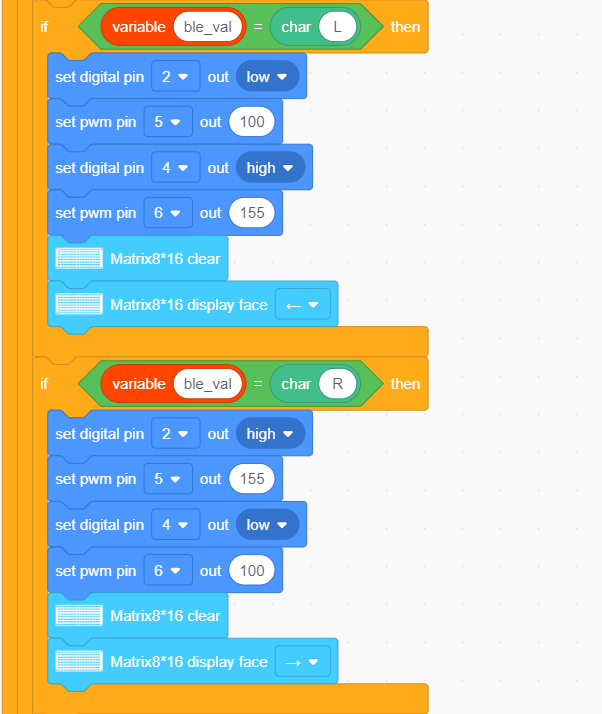
押す: L |
ボタンを押すと車が左折; |
|
押す: R |
ボタンを押すと車が右折; |
|
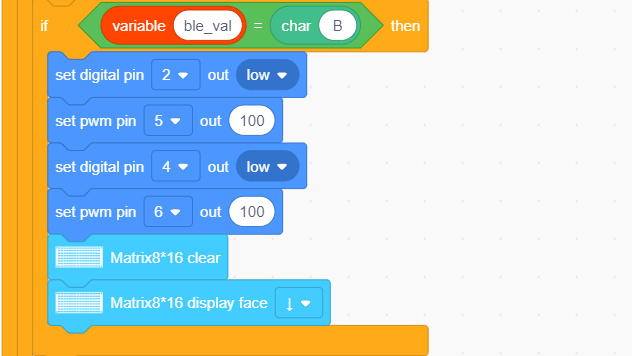
押す: B |
ボタンを押すと車が後退; |
|
押す: “a” |
クリックで加速(最大値:255) |
|
押す: “d” |
クリックで減速(最小値:0) |
|
クリックで携帯電話の重力センサー機能を開始 |
|
|
“X”を送信、 |
ライントラッキング機能を開始; |
|
“Y”を送信、 |
超音波回避機能を開始; |
|
“U”を送信、 |
超音波追従機能を開始; |
|
“G”を送信、 |
制限機能を開始; |











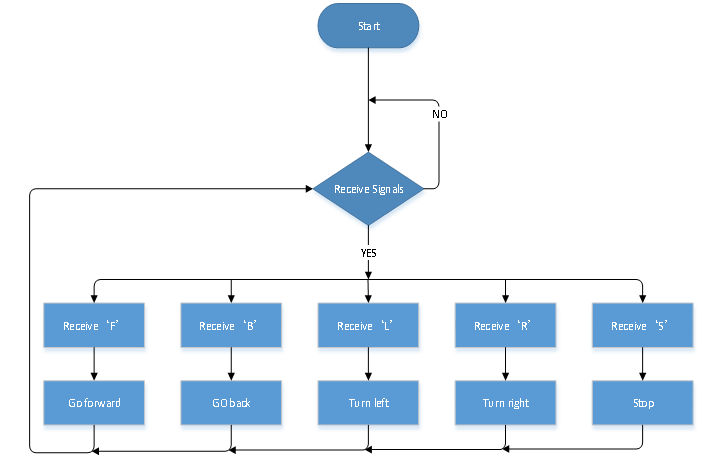
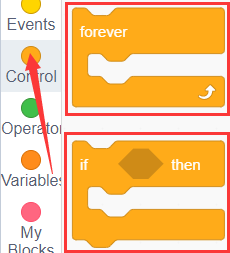
3.フローチャート
4.配線図
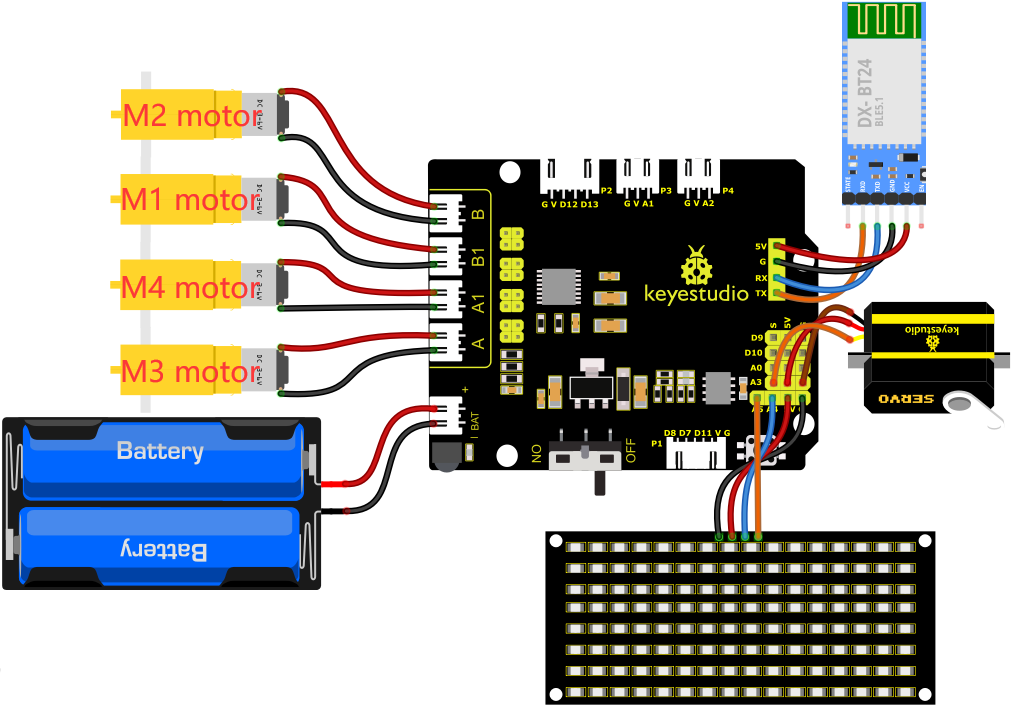
1). 8*8 LEDボードのGND、VCC、SDA、SCLは拡張ボードのG(GND)、V(VCC)、A4、A5に接続します。
2). BluetoothモジュールのRXD、TXD、GND、VCCはそれぞれ8833モータードライバー拡張ボードのTX、RX、G、5Vに接続します。BluetoothモジュールのSTATEとBRKピンは接続不要です。
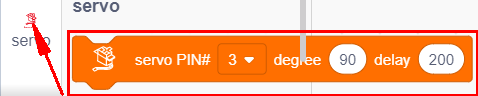
3). サーボはG、V、A3に接続します。茶色の線はGnd(G)、赤色の線は5V(V)、オレンジ色の線はA3に接続します。
4). 電源はBATポートに接続します。
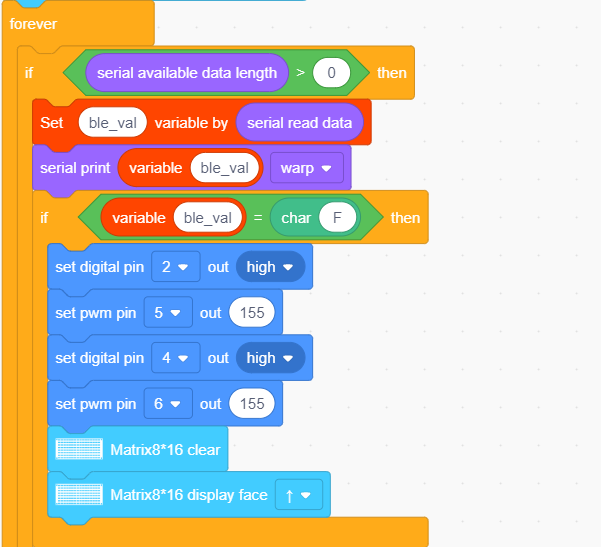
5.テストコード
コードを書く前に、8x16 LEDボードとサーボのライブラリファイルをインポートする必要があります。具体的な手順は以下の通りです:
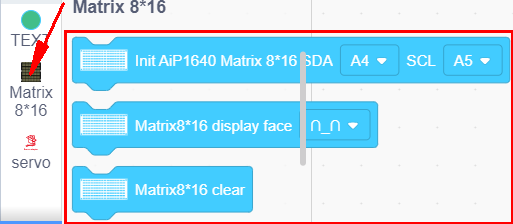
 をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Matrix 8*16 Aip1640」モジュール
をクリックしてセンサー/モジュール/コンポーネントの拡張ライブラリ画面に入り、「Matrix 8*16 Aip1640」モジュール を検索してクリックします。これにより、「Not loaded」が「loaded」に変わり、「Matrix 8*16 Aip1640」モジュールが正常に追加されたことを示します。
を検索してクリックします。これにより、「Not loaded」が「loaded」に変わり、「Matrix 8*16 Aip1640」モジュールが正常に追加されたことを示します。
 をクリックしてコードエディタ画面に戻ると、追加された「Matrix 8*16 Aip1640」モジュールと「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
をクリックしてコードエディタ画面に戻ると、追加された「Matrix 8*16 Aip1640」モジュールと「Servo」コンポーネントの命令ブロックがモジュールエリアに表示されます。
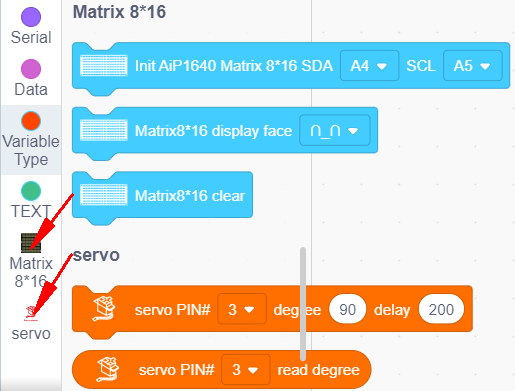
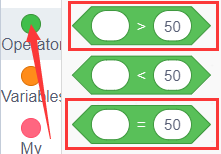
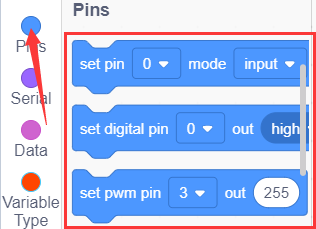
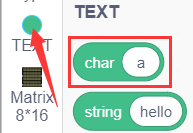
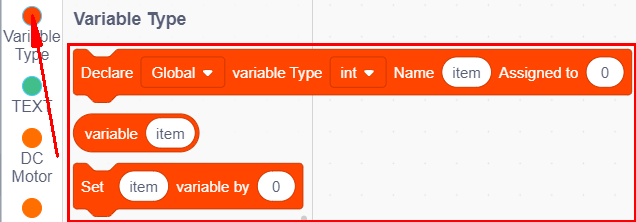
ブロックをドラッグして編集できます。以下に示すブロックは参考用です。
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
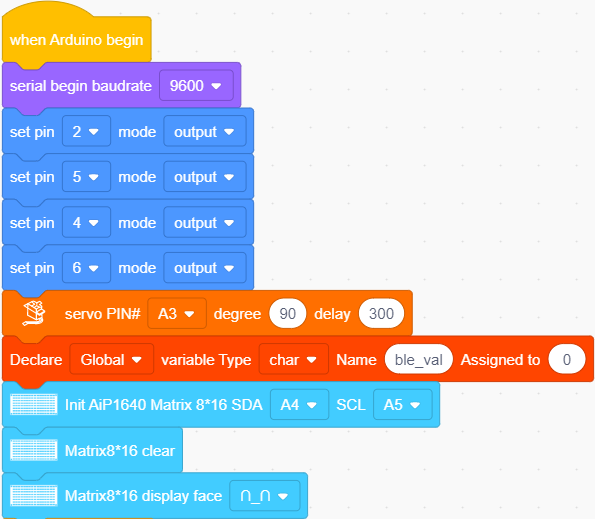
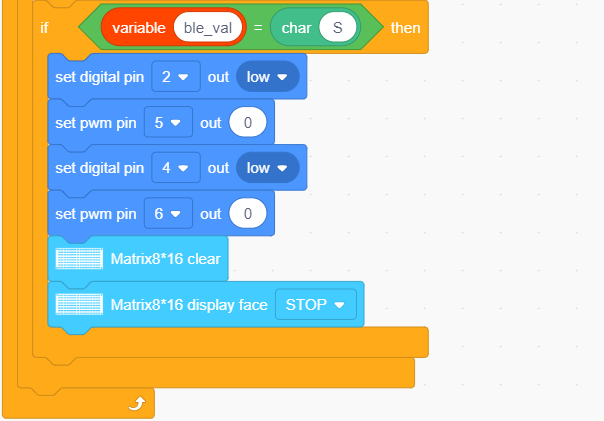
完成したテストコード
注意: テストコードをアップロードする前にBluetoothモジュールを取り外す必要があります。そうしないとコードのアップロードに失敗します。コードのアップロードが成功した後にBluetoothモジュールを接続してください。
6. テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、外部電源を入れてからDIPスイッチをONにします。
BTモジュールを差し込み、スマートフォンでBluetoothに接続してスマートカーを操作します。車は前進、後退、左折、右折、停止が可能です。また、8*8 LEDボードには対応するパターンが表示されます。