Progetto 4 Controllo Servo
1. Descrizione

Il servo motore è un attuatore rotativo a controllo di posizione. È composto principalmente da un alloggiamento, una scheda circuito, un motore core-less, un ingranaggio e un sensore di posizione. Il suo principio di funzionamento è che il servo riceve il segnale inviato da MCU o ricevitori e produce un segnale di riferimento con un periodo di 20ms e una larghezza di 1,5ms, quindi confronta la tensione di polarizzazione continua acquisita con la tensione del potenziometro e ottiene l’uscita della differenza di tensione.
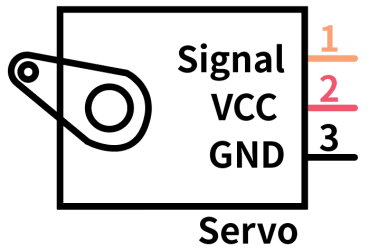
In generale, il servo ha tre fili di colore marrone, rosso e arancione. Il filo marrone è collegato a massa, quello rosso è il polo positivo e quello arancione è il filo del segnale.
L’angolo di rotazione del servo motore è controllato regolando il duty cycle del segnale PWM (Pulse-Width Modulation). Il ciclo standard del segnale PWM è di 20ms (50Hz). Teoricamente, la larghezza è distribuita tra 1ms e 2ms, ma in realtà è tra 0,5ms e 2,5ms. La larghezza corrisponde all’angolo di rotazione da 0° a 180°. Ma si noti che per motori di marche diverse, lo stesso segnale può avere angoli di rotazione differenti.
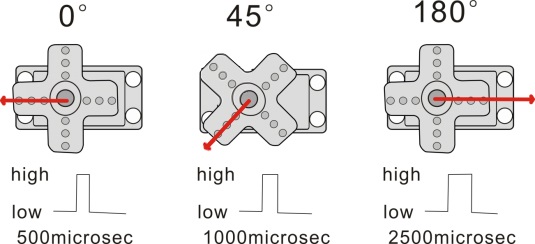
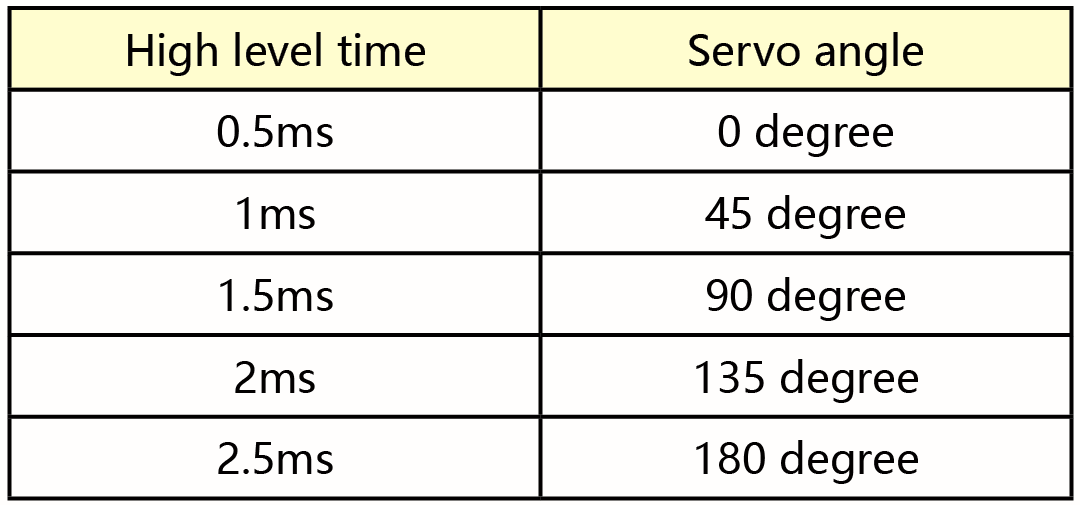
Gli angoli corrispondenti del servo sono mostrati di seguito:
2. Specifiche
Tensione di lavoro: DC 4.8V ~ 6V
Gamma angolare operativa: circa 180° (a 500 → 2500 μsec)
Gamma di larghezza impulso: 500 → 2500 μsec
Velocità a vuoto: 0.12 ± 0.01 sec / 60 (DC 4.8V) 0.1 ± 0.01 sec / 60 (DC 6V)
Corrente a vuoto: 200 ± 20mA (DC 4.8V) 220 ± 20mA (DC 6V)
Coppia di arresto: 1.3 ± 0.01kg · cm (DC 4.8V) 1.5 ± 0.1kg · cm (DC 6V)
Corrente di arresto: ≦ 850mA (DC 4.8V) ≦ 1000mA (DC 6V)
Corrente in standby: 3 ± 1mA (DC 4.8V) 4 ± 1mA (DC 6V)
3. Componenti
Scheda di Sviluppo *1 |
Driver Motore 8833 *1 |
Servo*1 |
|---|---|---|
|
|
|
Porta batteria 18650*1 |
Cavo USB*1 |
Batteria 18650*2 (fornita dall’utente) |
|
|
|






4. Schema di Collegamento
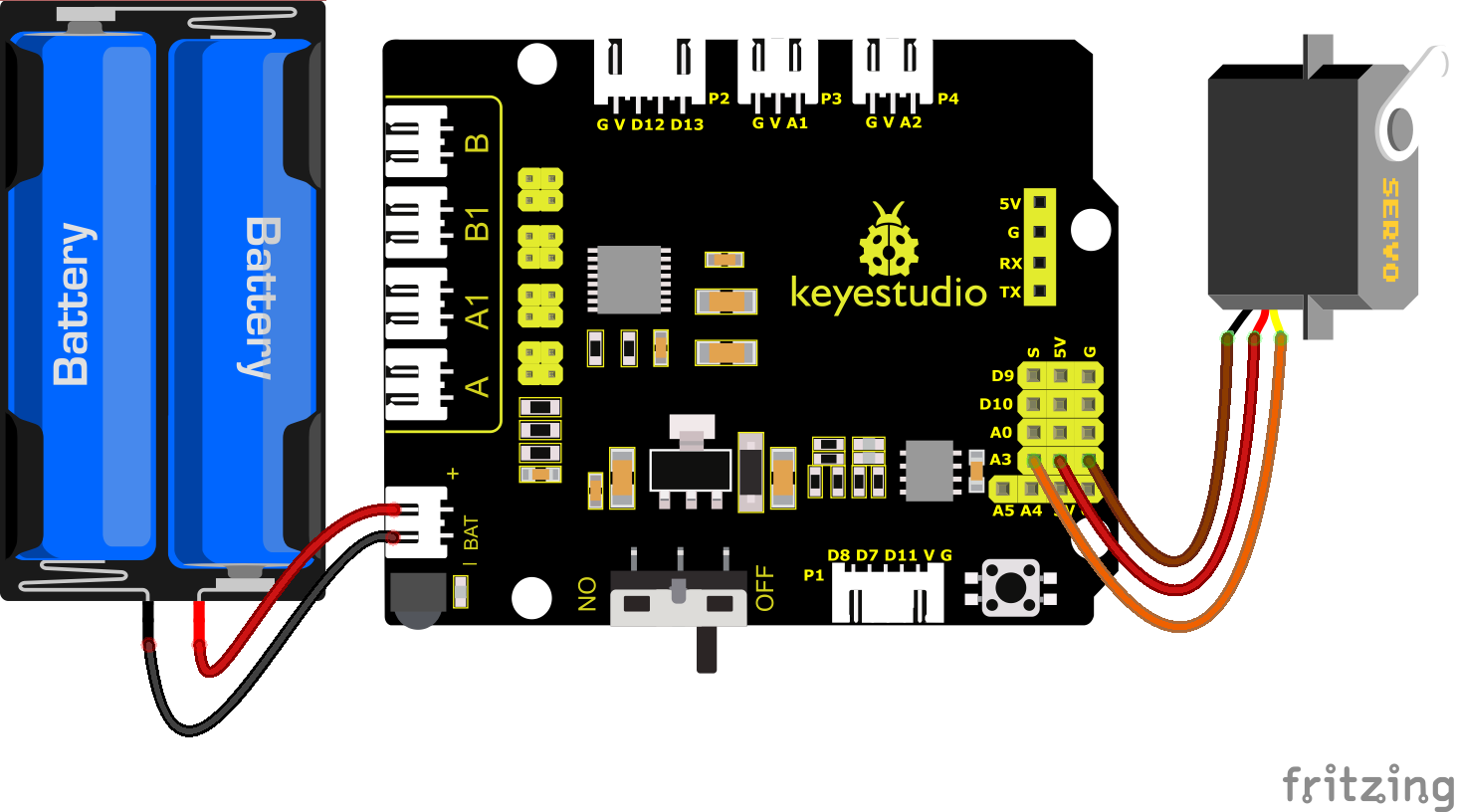
Nota sul cablaggio: Il servo è collegato a G (GND), V (VCC) e A3, il filo marrone del servo è collegato a Gnd (G), quello rosso è collegato a 5V (V) e quello arancione è collegato ad A3.
Il servo deve essere collegato a un’alimentazione esterna a causa dell’elevata richiesta di corrente per la guida del servo. Generalmente, la corrente della scheda di sviluppo non è sufficiente. Se non si collega l’alimentazione esterna, la scheda di sviluppo potrebbe bruciarsi.
5. Codice di Test
Prima di scrivere il codice, è necessario importare il file della libreria servo. I passaggi specifici sono i seguenti:
Cliccare  per entrare nell’interfaccia della libreria di estensione di sensori/moduli/componenti, quindi cercare “Servo”.
per entrare nell’interfaccia della libreria di estensione di sensori/moduli/componenti, quindi cercare “Servo”.

Selezionare il componente e cliccarlo. In questo modo, “Not Loaded” cambia in “loaded”, indicando che il componente “Servo” è stato aggiunto con successo.

Cliccare  per tornare all’editor di codice, e nell’area moduli si può vedere il blocco direttiva del componente “Servo” aggiunto.
per tornare all’editor di codice, e nell’area moduli si può vedere il blocco direttiva del componente “Servo” aggiunto.

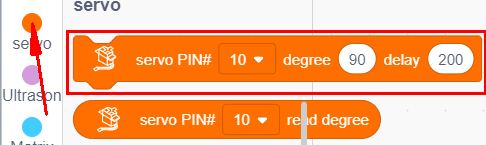
È possibile trascinare i blocchi per modificare. I blocchi elencati di seguito sono per riferimento.
(1).
(2).
(3).
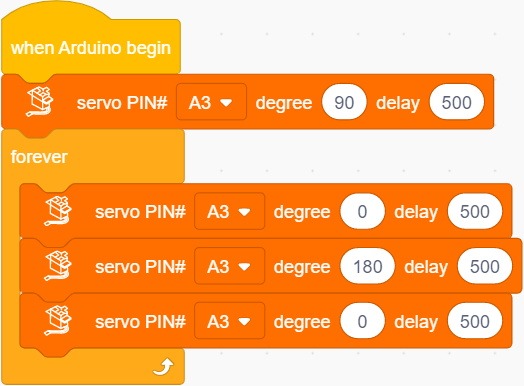
Codice di Test Completo
6. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo lo schema di collegamento e alimentare l’alimentazione esterna. Dopo l’accensione, spostare l’interruttore dip su “ON”, quindi il servo oscillerà nell’intervallo da 0° a 180°.