Progetto 12 Auto Intelligente a Inseguimento Ultrasonico
1.Descrizione
In questo progetto, cercheremo di rilevare la distanza tra l’auto intelligente 4WD e gli ostacoli davanti tramite un sensore ultrasonico per pilotare due motori in modo che l’auto si muova e faccia mostrare alla scheda LED 8*8 un motivo facciale sorridente.
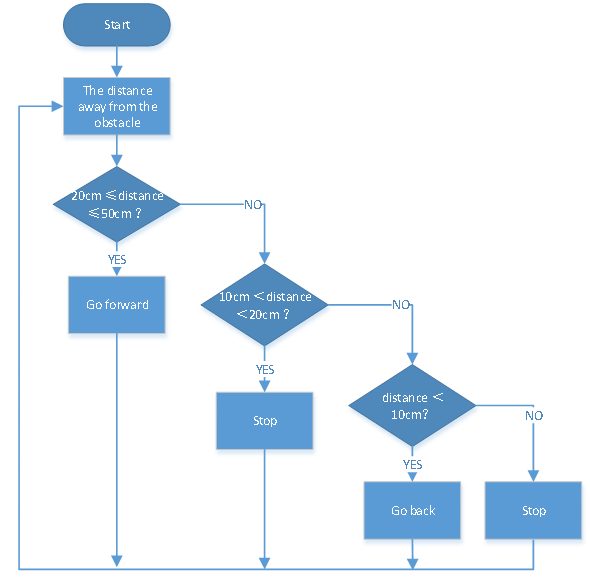
2.Diagramma di Flusso
| Rilevamento | Distanza misurata degli ostacoli frontali | distanza (unità: cm) |
| Impostazione | La scheda LED 8*16 mostra un motivo sorridente. | |
| Imposta il servo a 90° | ||
| Condizione | distanza≥20 e distanza≤50 | |
| Stato | Avanti | |
| Condizione | distanza>10 e distanza<20 | |
| distanza>50 | ||
| Condizione | fermo | |
| Condizione | distanza≤10 | |
| Condizione | Indietro |
3.Diagramma di Collegamento
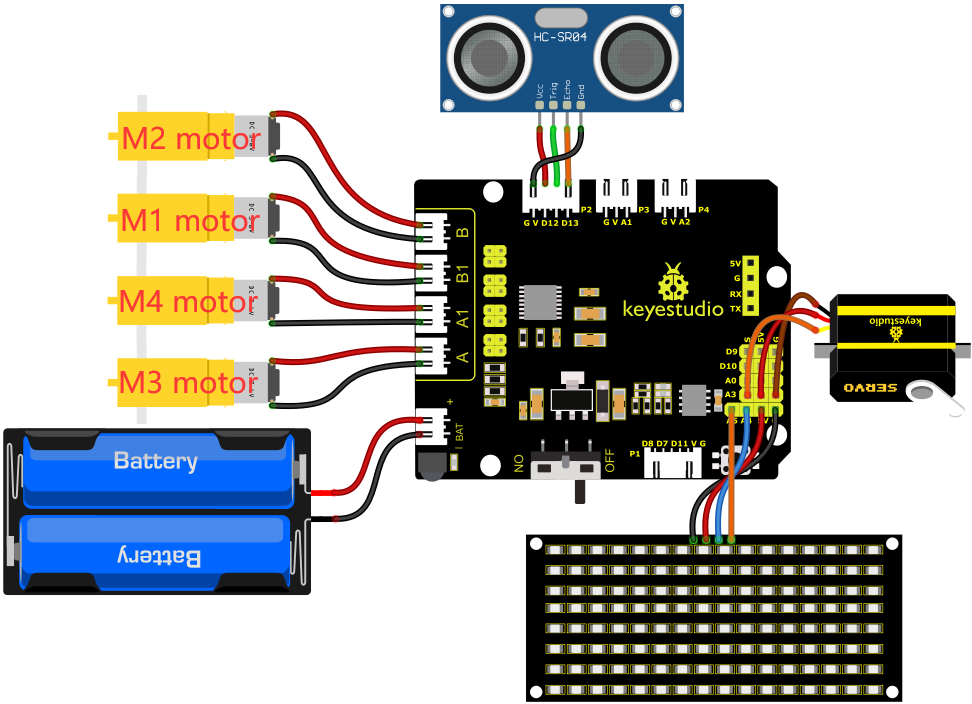
Collegamenti:
1). GND, VCC, SDA e SCL della scheda LED 8*8 sono collegati a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). VCC, Trig, Echo e Gnd del sensore ultrasonico sono collegati a 5V (V), D12 (S), D13 (S) e Gnd (G).
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso è collegato a 5V (V) e il filo arancione è collegato ad A3.
4). L’alimentazione è collegata alla porta BAT.
4.Codice di Test
Prima di scrivere il codice, è necessario importare i file di libreria del sensore ultrasonico, della scheda LED 8x16 e del servo. I passaggi specifici sono i seguenti:
Clicca  per entrare nell’interfaccia della libreria di estensione di sensori/moduli/componenti, poi cerca il sensore “Ultrasonic”
per entrare nell’interfaccia della libreria di estensione di sensori/moduli/componenti, poi cerca il sensore “Ultrasonic”  e cliccalo.
e cliccalo.
In questo modo, “Not loaded” cambia in “loaded”, indicando che il sensore “Ultrasonic” è stato aggiunto con successo.

I file di libreria della scheda LED 8x16 e del servo sono aggiunti allo stesso modo del sensore ultrasonico.
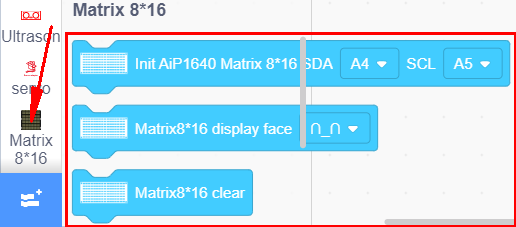
Clicca  per tornare all’interfaccia dell’editor di codice, il blocco di istruzioni del sensore “Ultrasonic”, del modulo “Matrix 8*16 Aip1640” e del componente “Servo” può essere visto nell’area modulo.
per tornare all’interfaccia dell’editor di codice, il blocco di istruzioni del sensore “Ultrasonic”, del modulo “Matrix 8*16 Aip1640” e del componente “Servo” può essere visto nell’area modulo.
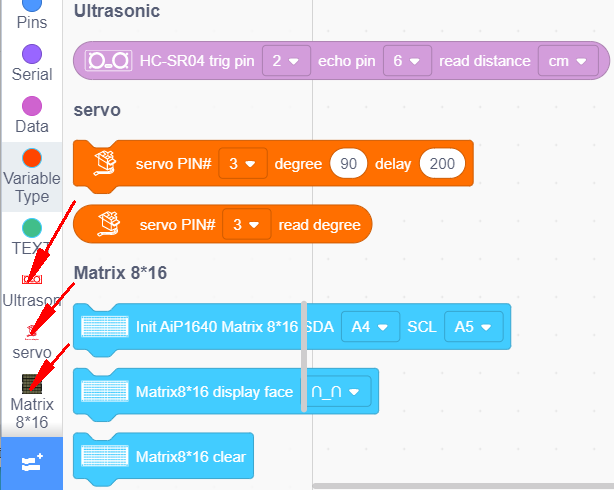
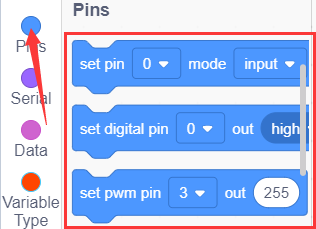
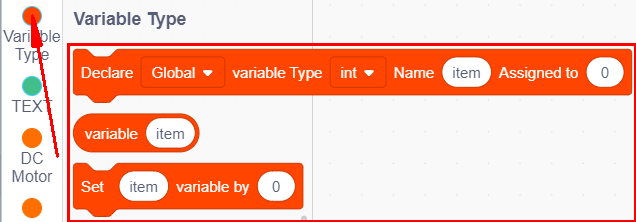
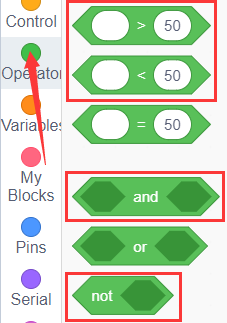
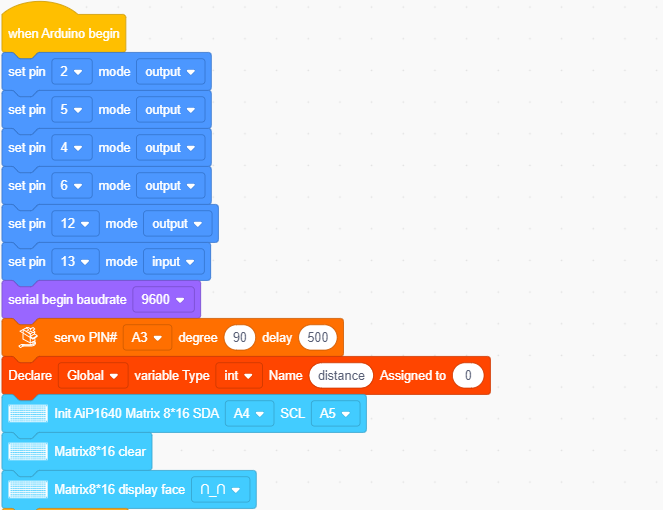
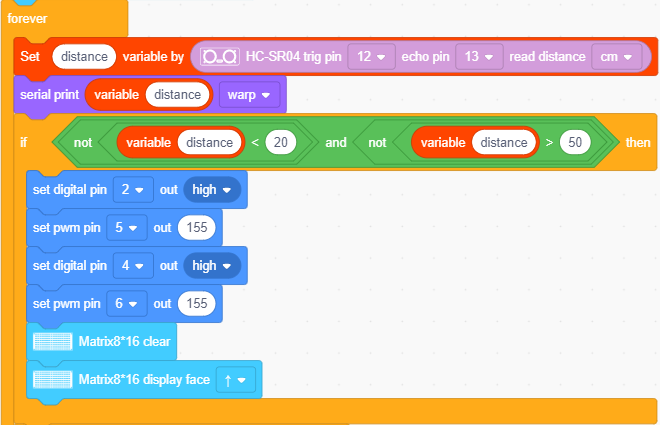
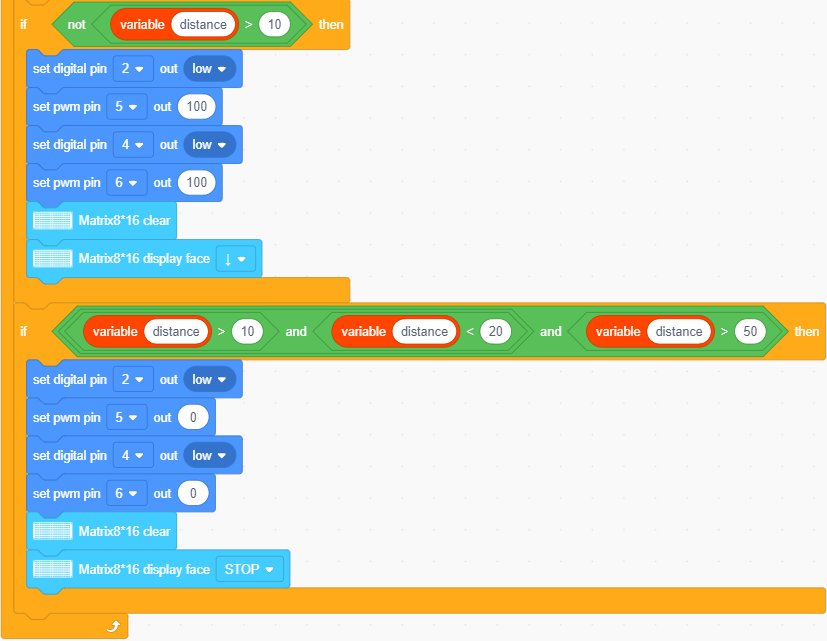
Puoi trascinare i blocchi per modificare. I blocchi elencati di seguito sono per riferimento
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
Codice di Test Completo
5.Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo il diagramma di collegamento, accendi l’alimentazione esterna e poi porta l’interruttore DIP su ON. Imposta il servo a 90°, l’auto intelligente si muoverà in base agli ostacoli e la scheda LED 8X16 mostrerà un “sorriso”.