Progetto 11 Auto Intelligente a Inseguimento di Linea
1. Descrizione
Basandoci sul principio di funzionamento del sensore di inseguimento linea, realizziamo un’auto intelligente a inseguimento di linea.
In questo progetto, rileviamo se c’è una linea nera sotto l’auto intelligente tramite un sensore di inseguimento linea, e poi controlliamo la rotazione dei due gruppi di motori in base ai risultati della rilevazione in modo da far muovere l’auto intelligente lungo la linea nera.
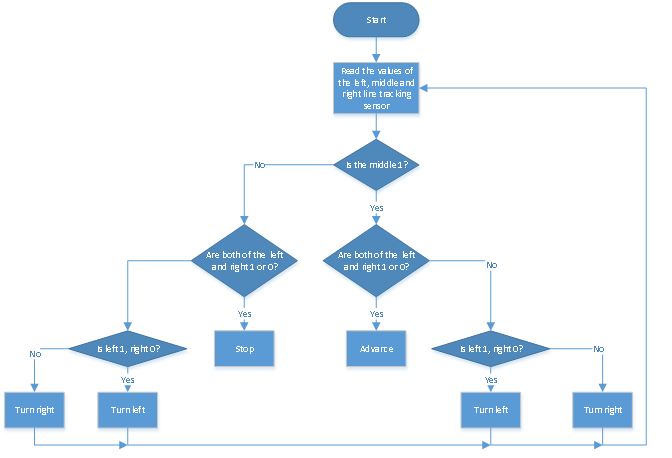
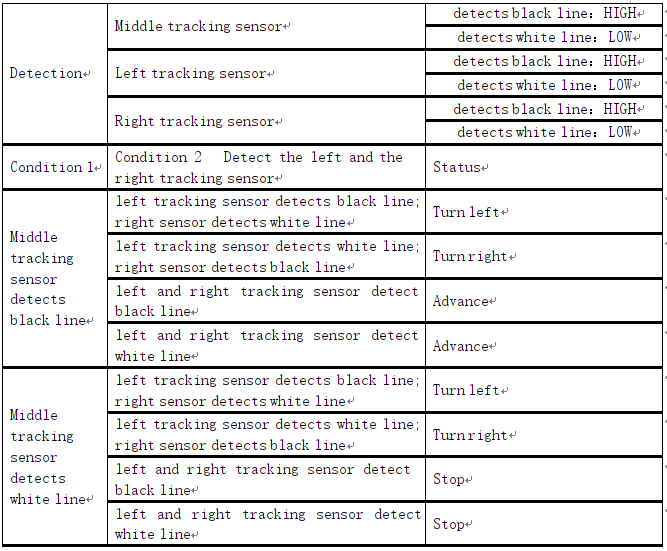
2. Diagramma di Flusso
3. Schema di Collegamento
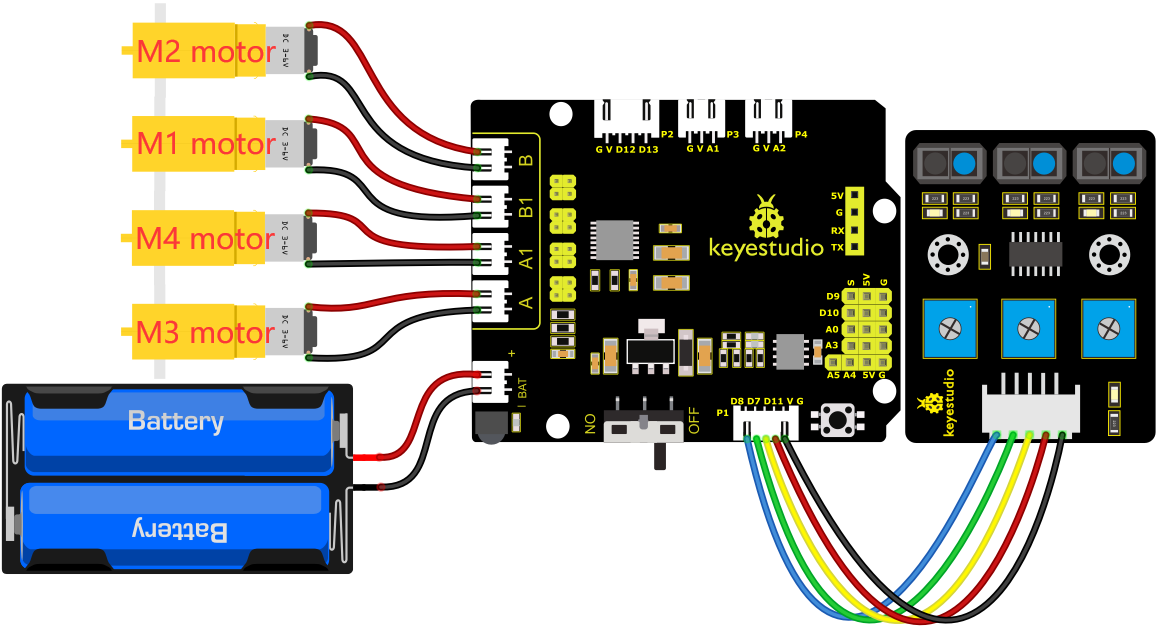
G, V, S1, S2 e S3 del sensore di inseguimento linea sono collegati a G (GND), V (VCC), D11, D7 e D8 della scheda di espansione sensori.
L’alimentazione è collegata alla porta BAT.
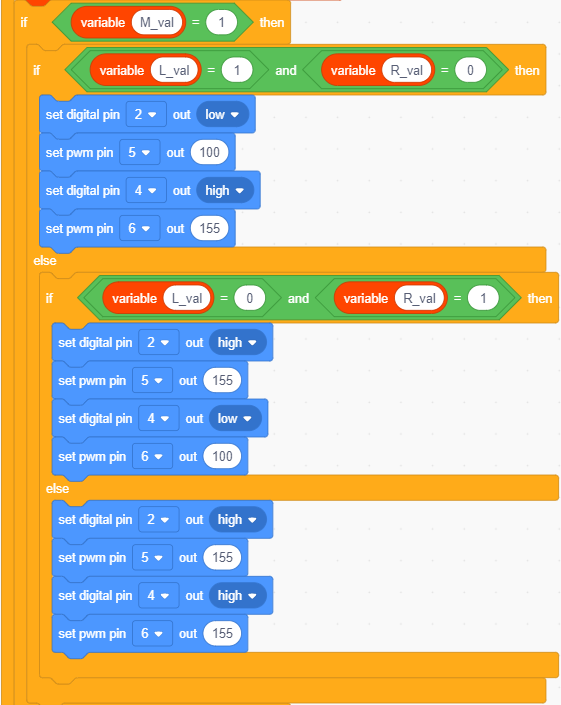
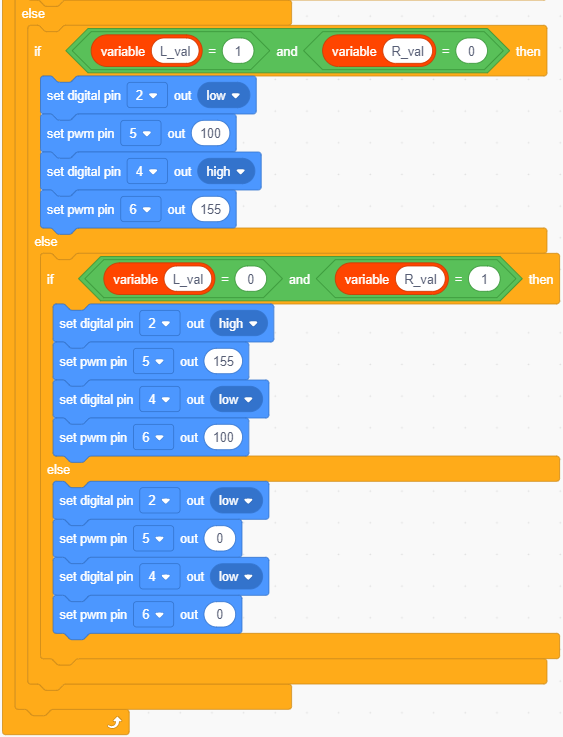
4. Codice di Test
Puoi trascinare i blocchi per modificare. I blocchi elencati di seguito sono per riferimento.
(1).
(2).
(3).
(4).
(5).
Codice di Test Completo

5. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i fili secondo lo schema di collegamento, accendi l’alimentazione esterna e poi porta l’interruttore DIP su ON. A questo punto l’auto intelligente seguirà le linee.