Project 15 Bluetooth Control Smart Car

1.Descrizione
Abbiamo appreso le conoscenze di base del Bluetooth. In questa lezione, realizzeremo un’auto intelligente controllata via Bluetooth. In questo progetto, consideriamo il telefono cellulare come trasmettitore (host) e l’auto intelligente collegata al modulo Bluetooth BT24 (slave) come ricevitore, utilizzando l’app mobile per controllare l’auto tramite Bluetooth.
2.Pulsanti di Controllo APP
Tasto |
Funzione |
|---|---|
|
Associa modulo Bluetooth DX-BT24 5.1 |
|
Disconnetti Bluetooth |


Carattere di controllo |
Funzione |
|
|---|---|---|
|
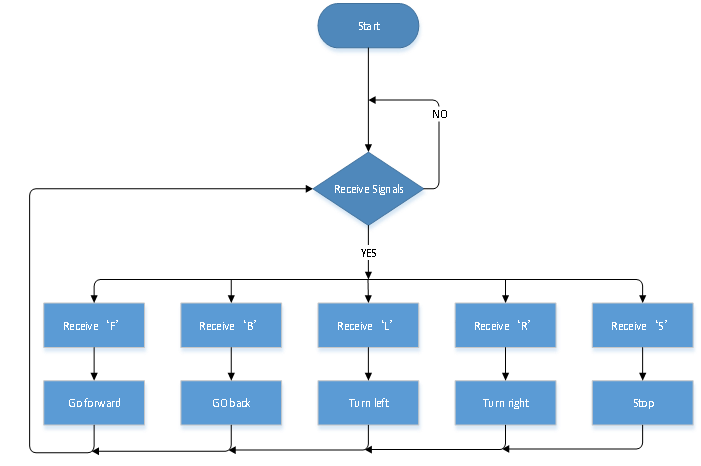
Premuto: F |
Premi il pulsante, l’auto va avanti; |
|
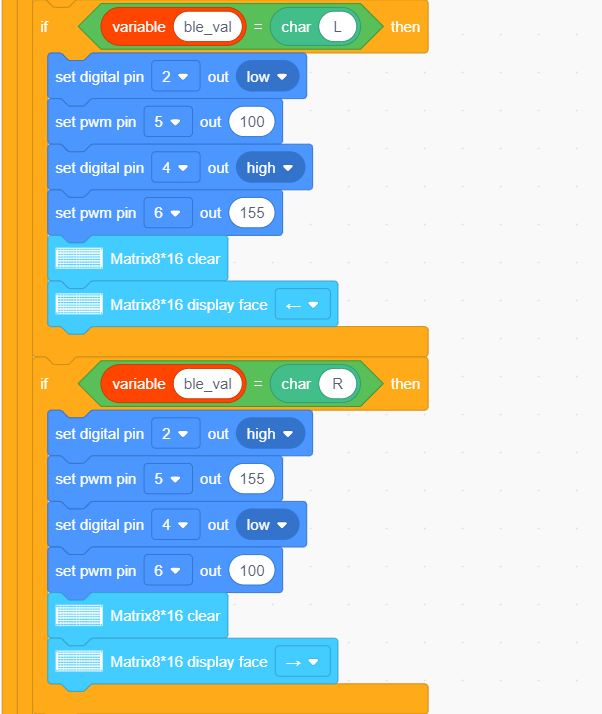
Premuto: L |
Premi il pulsante, l’auto gira a sinistra; |
|
Premuto: R |
Premi il pulsante, l’auto gira a destra; |
|
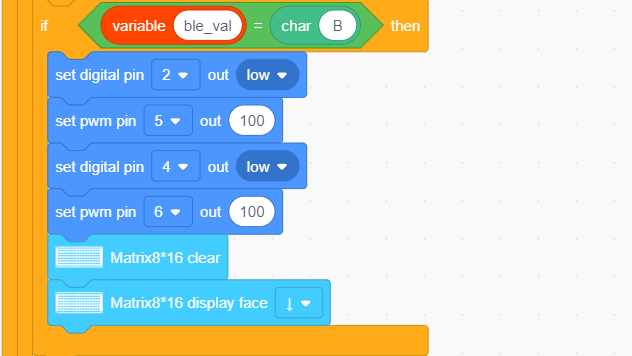
Premuto: B |
Premi il pulsante, l’auto va indietro; |
|
Premuto: “a” |
Clicca per accelerare (massimo:255) |
|
Premuto: “d” |
Clicca per rallentare (minimo:0) |
|
Clicca per avviare la funzione di |
|
|
Clicca per inviare “X”, |
Avvia la funzione di tracciamento linea; |
|
Clicca per inviare “Y”, |
Avvia la funzione di evitamento ad ultrasuoni; |
|
Clicca per inviare “U”, |
Avvia la funzione di inseguimento ad ultrasuoni; |
|
Clicca per inviare “G”, |
Avvia la funzione di restrizione; |











3.Diagramma di Flusso
4.Diagramma di Collegamento
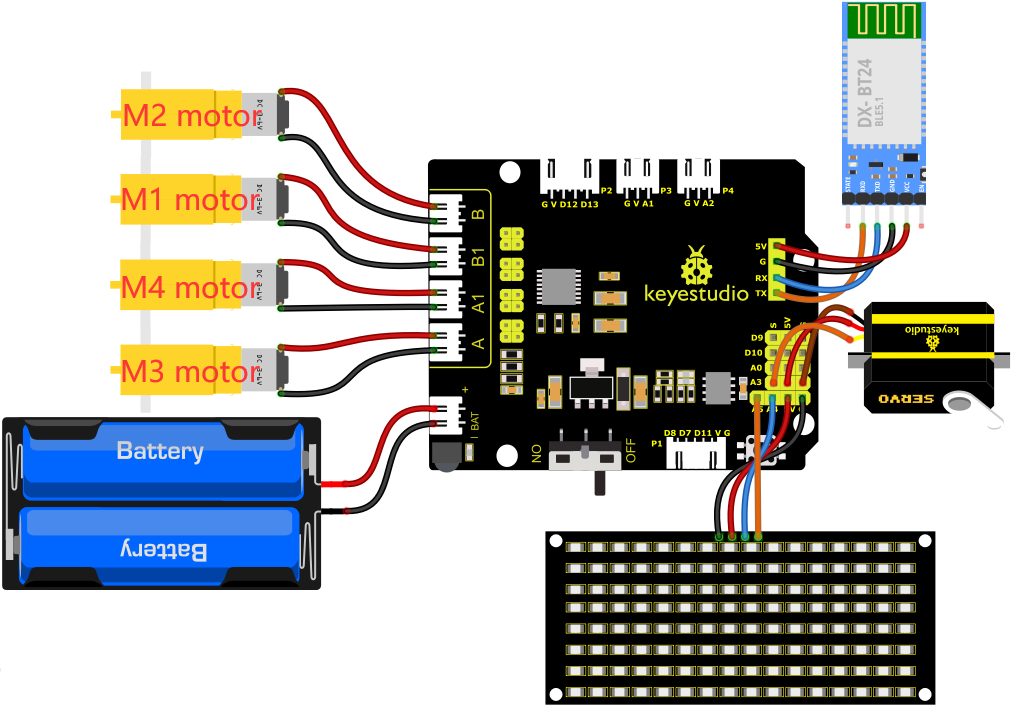
1). GND, VCC, SDA e SCL della scheda LED 8*8 sono collegati rispettivamente a G (GND), V (VCC), A4 e A5 della scheda di espansione.
2). RXD, TXD, GND e VCC del modulo Bluetooth sono collegati rispettivamente a TX, RX, G e 5V sulla scheda di espansione driver motore 8833, mentre i pin STATE e BRK del modulo Bluetooth non devono essere collegati.
3). Il servo è collegato a G, V e A3. Il filo marrone è collegato a Gnd (G), il filo rosso a 5V (V) e il filo arancione a A3.
4). L’alimentazione è collegata alla porta BAT
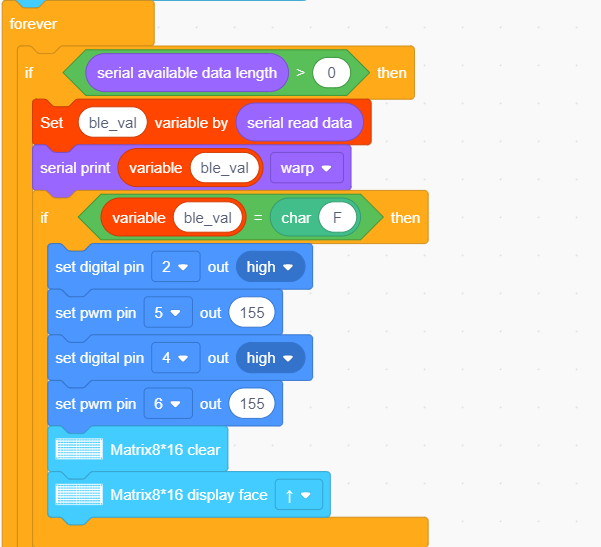
5.Codice di Test
Prima di scrivere il codice, è necessario importare i file della libreria della scheda LED 8x16 e del servo. I passaggi specifici sono i seguenti:
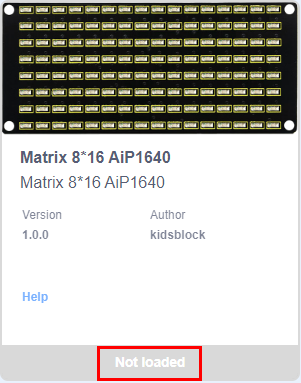
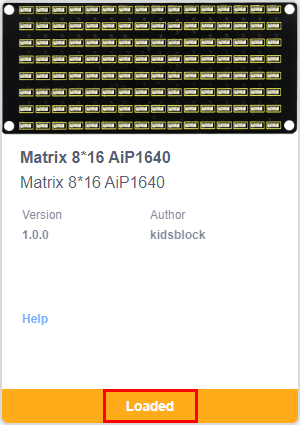
Clicca su  per entrare nell’interfaccia della libreria di estensioni di sensori/moduli/componenti, quindi cerca il modulo “Matrix 8*16 Aip1640”
per entrare nell’interfaccia della libreria di estensioni di sensori/moduli/componenti, quindi cerca il modulo “Matrix 8*16 Aip1640”  e cliccaci sopra. In questo modo, “Not loaded” cambia in “loaded”, indicando che il modulo “Matrix 8*16 Aip1640” è stato aggiunto con successo.
e cliccaci sopra. In questo modo, “Not loaded” cambia in “loaded”, indicando che il modulo “Matrix 8*16 Aip1640” è stato aggiunto con successo.
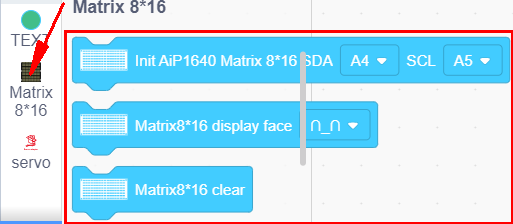
Clicca su  per tornare all’interfaccia dell’editor di codice, si possono vedere i blocchi di istruzioni del modulo “Matrix 8*16 Aip1640” aggiunto e del componente “Servo” nell’area modulo.
per tornare all’interfaccia dell’editor di codice, si possono vedere i blocchi di istruzioni del modulo “Matrix 8*16 Aip1640” aggiunto e del componente “Servo” nell’area modulo.
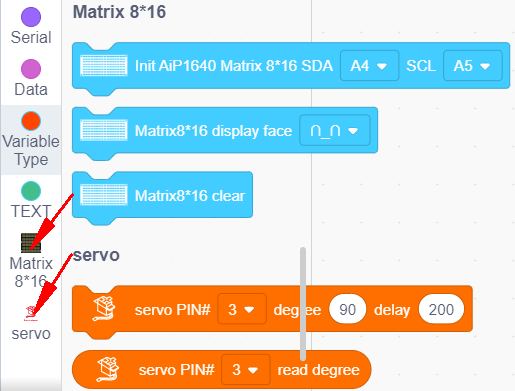
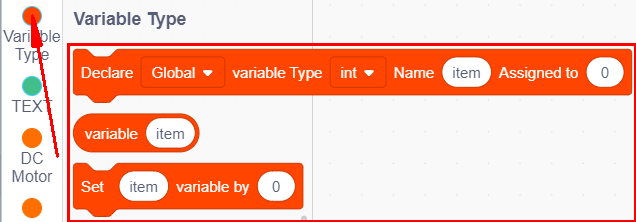
Puoi trascinare i blocchi per modificare. I blocchi elencati di seguito sono per riferimento.
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
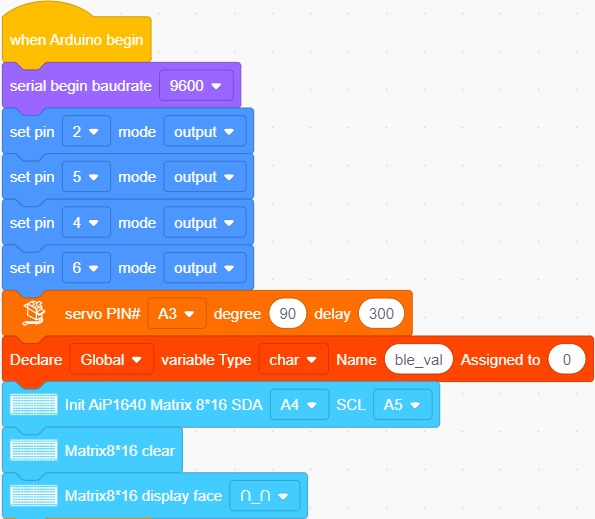
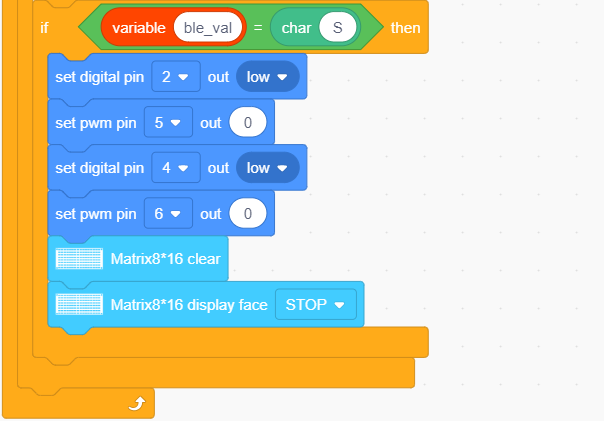
Codice di Test Completo
Nota: Prima di caricare il codice di test, è necessario rimuovere il modulo Bluetooth, altrimenti il codice non verrà caricato correttamente. Collega il modulo Bluetooth dopo aver caricato con successo il codice.
6. Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collega i cablaggi secondo lo schema elettrico, accendi l’alimentazione esterna e poi porta l’interruttore DIP su ON.
Inserisci il modulo BT e apri il cellulare per connetterti al Bluetooth per controllare l’auto intelligente. L’auto si muoverà avanti, indietro, girerà a sinistra e a destra e si fermerà. Inoltre, la scheda LED 8*8 mostrerà i pattern corrispondenti.