Progetto 8 Controllo Motore e Velocità
1. Descrizione
Esistono molti modi per pilotare i motori. La nostra auto utilizza il chip driver motore DRV8833 più comunemente usato, che fornisce una soluzione di pilotaggio elettrico a ponte a due canali per giocattoli, stampanti e altre applicazioni integrate con motori.
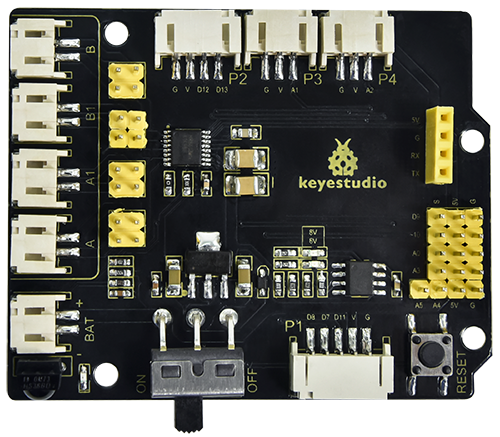
Quando impiliamo la scheda di espansione driver sulla scheda di sviluppo 4.0 e accendiamo la BAT, quindi impostiamo l’interruttore DIP sull’estremità ON, l’alimentazione esterna alimenterà contemporaneamente entrambe le schede. Per facilitare le connessioni dei cavi, la scheda di espansione driver è dotata di una porta anti-inversione (PH2.0-2P-3P-4P-5P). È possibile collegare direttamente i motori, l’alimentazione e i moduli sensore alla scheda di espansione driver.
L’interfaccia Bluetooth della scheda di espansione driver è completamente compatibile con il modulo Bluetooth DX-BT24 5.1. Quando si collega il modulo Bluetooth, è sufficiente inserirlo nell’interfaccia corrispondente. Allo stesso tempo, i pin a fila da 2,54 mm sono utilizzati per estrarre alcune porte digitali e analogiche inutilizzate sulla scheda di espansione driver, rendendola accessibile per aggiungere altri sensori e realizzare esperimenti di estensione.
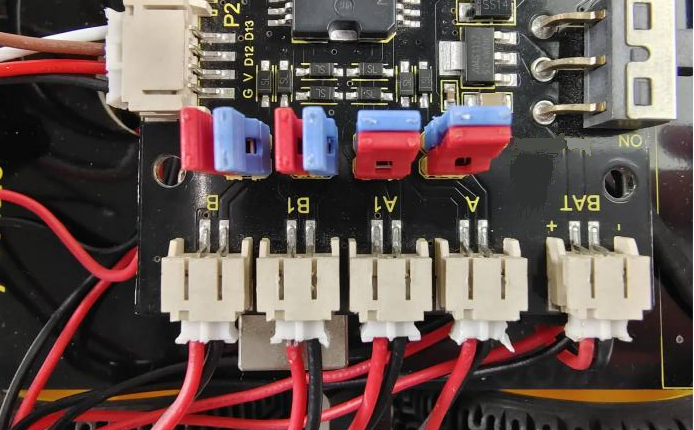
La scheda di espansione può essere collegata a quattro motori DC. Quando il cappuccio jumper è collegato di default, i motori delle porte A e A1 e B e B1 sono collegati in parallelo e hanno la stessa legge di movimento. 8 cappucci jumper possono essere utilizzati per controllare la direzione di rotazione delle 4 interfacce motore.
Ad esempio, quando i 2 cappucci jumper davanti a B1 del motore M1 cambiano da collegamento trasversale a collegamento longitudinale, la direzione di rotazione del motore M1 sarà opposta alla direzione di rotazione originale.
2. Specifiche
Tensione di ingresso per la logica: DC 5V
Tensione di ingresso per il pilotaggio: DC 6-9 V
Corrente di lavoro per la logica: <36mA
Corrente di lavoro per il pilotaggio: <2A
Massima dissipazione di potenza: 25W(T=75℃)
Livello di ingresso per il segnale di controllo: livello alto è 2.3V<Vin<5V, livello basso è -0.3V<Vin<1.5V
Temperatura di lavoro: -25+130℃
3. Scheda di espansione driver motore Keyestudio 8833
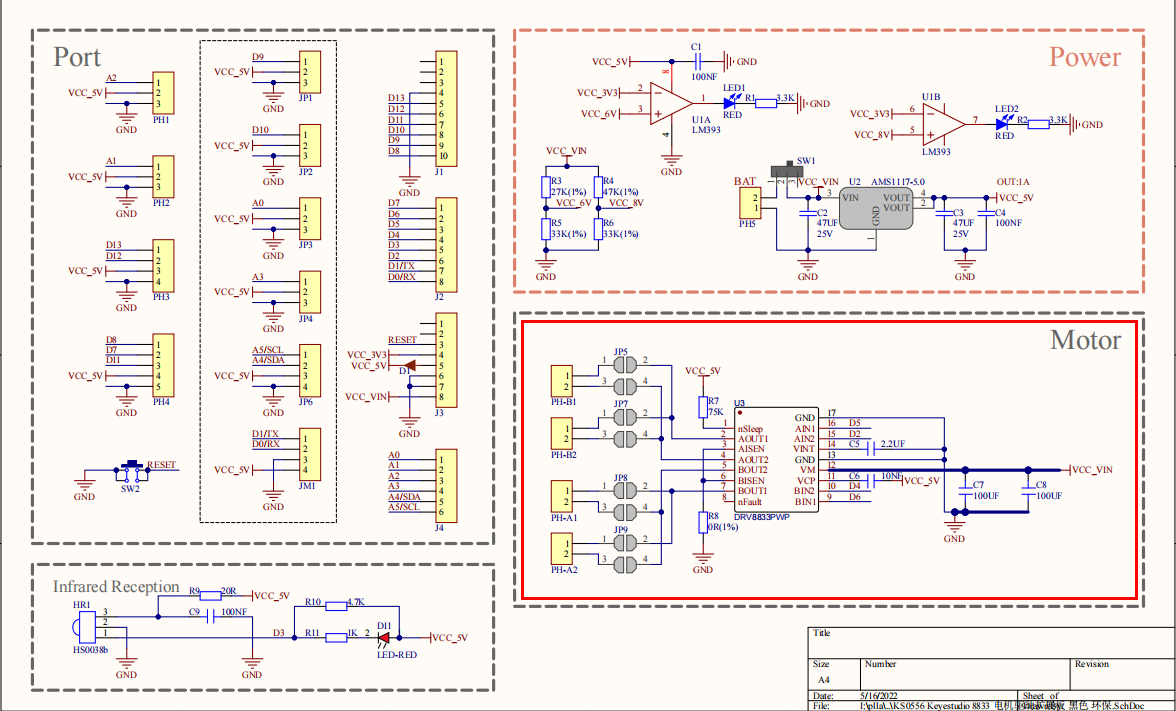
Principio di funzionamento
Utilizziamo la modalità di collegamento parallelo sullo stesso lato per i quattro motori, che possono essere considerati come due gruppi di motori. Come mostrato nel diagramma di cablaggio, B e B1 sono un gruppo, e A e A1 sono un gruppo.
I motori dello stesso gruppo devono ruotare nella stessa direzione. Se sono diversi, regolare i cappucci jumper corrispondenti accanto al terminale per cambiare la direzione.
Come mostrato di seguito, se le direzioni di A e A1 sono diverse, regolare la direzione dei cappucci jumper fino a quando la direzione di movimento dei motori dello stesso gruppo è coerente.
Dal diagramma sopra, si sa che il pin di direzione del motore A è D4, il pin di velocità è D6; D2 è il pin di direzione del motore B; e D6 è il pin di velocità.
Il PWM pilota l’auto robot. Il valore PWM è nell’intervallo 0-255. Quando impostiamo la direzione su HIGH, più piccolo è il numero PWM, più veloce è la rotazione del motore.
| D2 | D5(PWM) | Motore B(sinistra) | D4 | D6(PWM) | Motore A(destra) | |
| Avanti | HIGH | 255-200 | Ruota in senso orario | HIGH | 255-200 | Ruota in senso orario |
| Indietro | LOW | 200 | Ruota in senso antiorario | LOW | 200 | Ruota in senso antiorario |
| Gira a sinistra | HIGH | 255-200 | Ruota in senso orario | LOW | 200 | Ruota in senso antiorario |
| Gira a destra | LOW | 200 | Ruota in senso antiorario | HIGH | 255-200 | Ruota in senso orario |
Scheda di Sviluppo *1 |
Driver Motore 8833 *1 |
Cavo USB*1 |
|---|---|---|
|
|
|
Supporto Batteria 18650*1 |
Motore*4 |
Batteria 18650 *2(fornita dall’utente) |
|
|
|





5.Diagramma di Collegamento
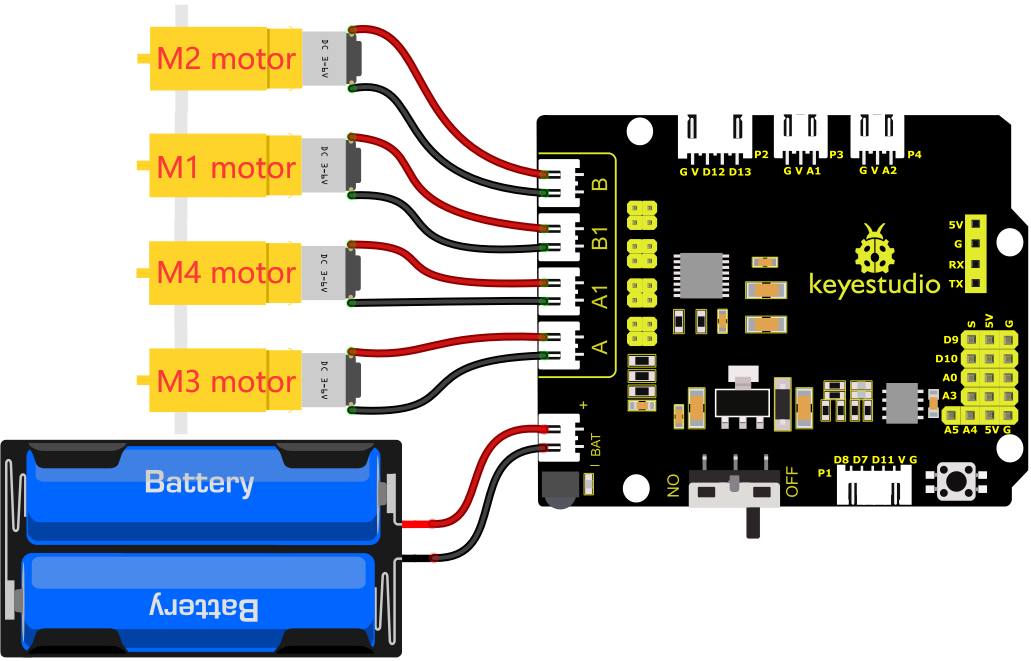
Collegare l’alimentazione alla porta BAT.
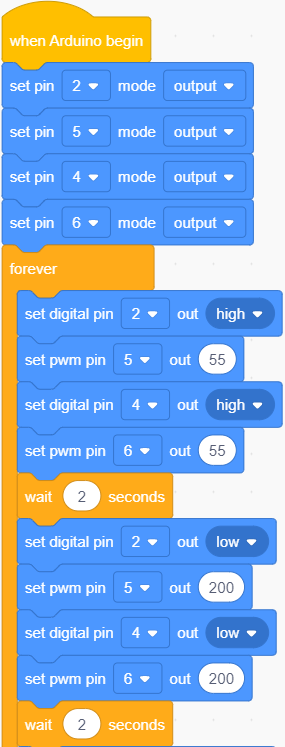
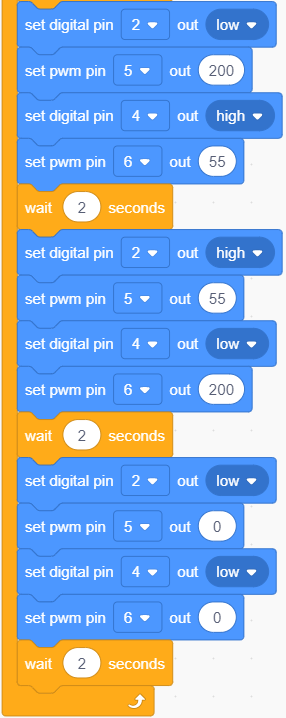
6.Codice di Test
Puoi trascinare i blocchi per modificare. I blocchi elencati di seguito sono per riferimento
(1).
(2).
(3).
Codice di Test Completo
7.Risultato del Test
Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo il diagramma di collegamento, quindi accendere l’alimentazione esterna e impostare l’interruttore DIP su ON, l’auto andrà avanti per 2s, indietro per 2s, girerà a sinistra per 2s e a destra per 2s e si fermerà per 2s.
8.Spiegazione del Codice
Regola la velocità con cui il PWM controlla il motore, collegare nello stesso modo.
Codice di Test Completo
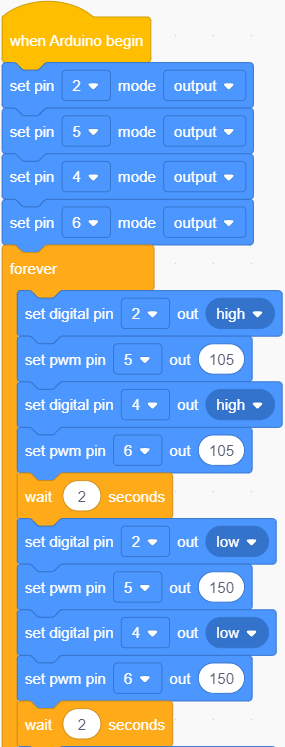

Dopo aver caricato con successo il codice sulla scheda V4.0, collegare i cablaggi secondo il diagramma di collegamento, quindi accendere l’alimentazione esterna e impostare l’interruttore DIP su ON, noterai che la velocità del motore è molto più lenta.
Nota: La batteria scarica porterà a una velocità del motore più lenta.