Progetto 25 Misuratore di Distanza Ultrasonico
1. Descrizione
Questo misuratore di distanza ultrasonico misura la distanza degli ostacoli emettendo onde sonore e poi ricevendo l’eco. Cioè, la distanza non è un valore immediato, ma uno osservato tramite un calcolo teorico della differenza di tempo tra emettitore e ricevitore.
L’ultrasuono è in grado di rilevare la forma degli oggetti, attivare porte automatiche e stimare la velocità di flusso e la pressione.
Inoltre, supporta lavori cooperativi con computer. Di conseguenza, il valore misurato può essere trasmesso ai computer tramite scheda Arduino.
Nella vita quotidiana, è ampiamente utilizzato per motori, servocomandi e LED così come per sistemi (navigazione automatica, controllo e sistemi di monitoraggio della sicurezza).
2. Principio di Funzionamento
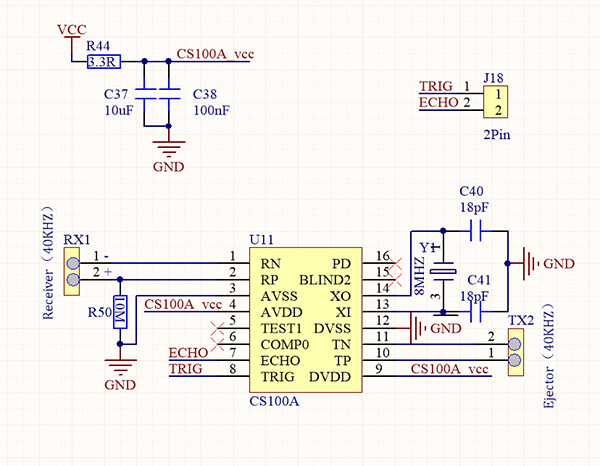
Come tutti sappiamo, l’ultrasuono è un tipo di segnale sonoro ad alta frequenza non udibile. Simile a un pipistrello, questo modulo misura la distanza degli ostacoli calcolando la differenza di tempo tra l’emissione dell’onda e la ricezione dell’eco.
Distanza massima: 3M
Distanza minima: 5cm
Angolo di rilevamento: ≤15°
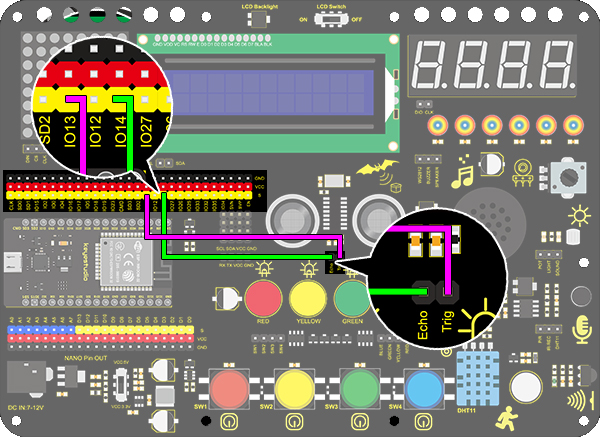
3. Schema di Collegamento
4. Codice di Test
/*
keyestudio ESP32 Inventor Learning Kit
Project 25.1:Ultrasonic Rangefinder
http://www.keyestudio.com
*/
int distance = 0; //Define a variable to receive the diatance value
int EchoPin = 14; //Connect Echo pin to io14
int TrigPin = 13; //Connect Trig pin to io13
float checkdistance() { //Acquire the distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2); //Delay 2um
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10); //Delay 10um
digitalWrite(TrigPin, LOW);
//Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance; //Return the diatance value
}
void setup()
{
Serial.begin(9600);//Set the baud rate to 9600
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop()
{
distance = checkdistance(); //Assign the read value to "distance"
if (distance < 4 || distance >= 400) //Display "-1" if exceeding the detection range
{
distance = -1;
}
Serial.print("ditance: ");
Serial.print(distance);
Serial.println(" CM");
delay(200);
}
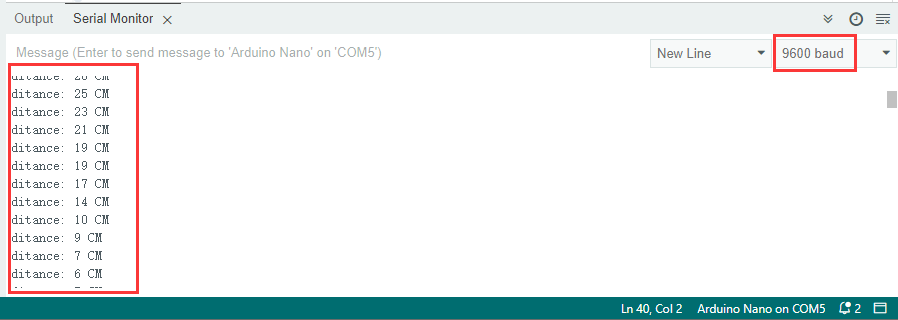
5. Risultato del Test
Dopo aver collegato i fili e caricato il codice, aprire il monitor seriale impostando la velocità di trasmissione a 9600, la porta seriale stampa il valore della distanza.
6. Approfondimento
Creiamo un misuratore di distanza.
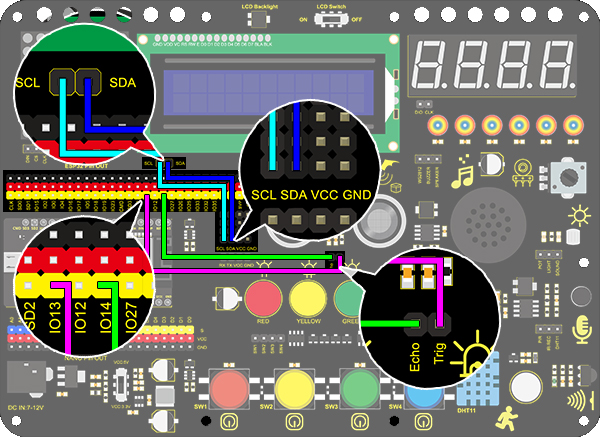
Visualizziamo i caratteri su LCD 1602. Programmare per mostrare “Keyestudio” in (3,0) e “distance:” in (0,1) seguito dal valore della distanza in (9,1).
Quando il valore è inferiore a 100 (o 10), rimane un residuo della terza (o della seconda) cifra. Pertanto, è necessario un controllo “if” per determinare una certa condizione.
Schema di Collegamento:
Codice:
/*
keyestudio ESP32 Inventor Learning Kit
Project 25.2:Ultrasonic Rangefinder
http://www.keyestudio.com
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2); //set the LCD address to 0x27 for a 16 chars and 2 line display
int distance = 0; //Define a variable to receive the diatance value
int EchoPin = 14; //Connect Echo pin to io14
int TrigPin = 13; //Connect Trig pin to io13
float checkdistance() { //Acquire the distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
void setup()
{
Serial.begin(9600);//Set the baud rate to 9600
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
lcd.init(); // initialize the lcd
// Print a message to the LCD.
lcd.backlight();
lcd.setCursor(3,0);
lcd.print("Keyestudio");
}
void loop()
{
distance = checkdistance();
if (distance < 2 || distance >= 400) //Display "-1" if exceeding the detection range
{
distance = -1;
}
if(distance < 100 && distance > 10){ //Eliminate the shadow of the third digit when the value drops to two digits
lcd.setCursor(11,1);
lcd.print(" ");
}
if(distance < 10)//Eliminate two-digit shadows when the value drops to one digit
{
lcd.setCursor(10,1);
lcd.print(" ");
}
lcd.setCursor(0,1);
lcd.print("distance:");
lcd.setCursor(9,1);
lcd.print(distance);
delay(200);
}