Progetto 27 Parcheggio Intelligente
1. Descrizione
Questo sistema di parcheggio intelligente rileva e ottimizza la posizione di parcheggio tramite un sensore ad ultrasuoni. Con questo sistema, il parcheggio errato viene evitato in larga misura.
Per prima cosa, è necessario installare il sensore intorno al parcheggio. Successivamente, rileverà la distanza tra l’auto e i suoi bordi e invierà le informazioni alla scheda di sviluppo per controllare l’auto in modo da regolarla automaticamente nella posizione di parcheggio ottimale.
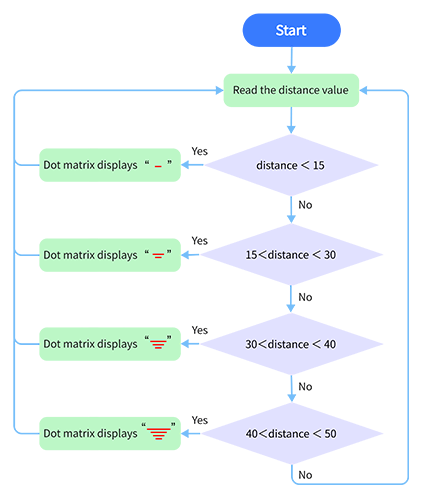
2. Diagramma di Flusso
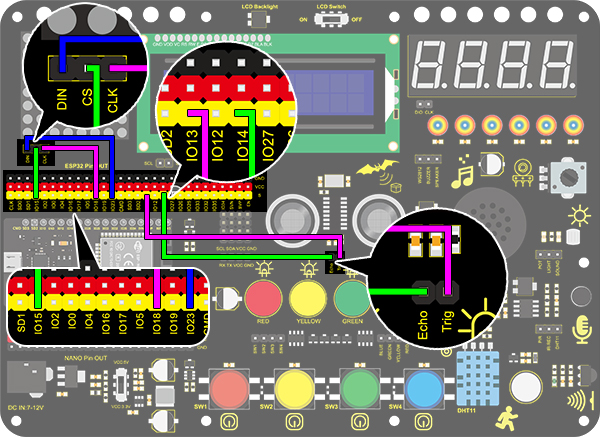
3. Schema di Collegamento
4. Codice di Test
/*
keyestudio ESP32 Inventor Learning Kit
Project 27 Intelligent Parking
http://www.keyestudio.com
*/
#include <LedControl.h>
int DIN = 23; //Define DIN pin to IO23
int CS = 15; //Define CS pin to IO15
int CLK = 18; //Define CLK pin to IO18
int temp = 0;
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
float checkdistance() { //Acquire distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
// Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
LedControl lc = LedControl(DIN, CLK, CS, 4);
byte data_val[4][8] =
{
{ 0x00, 0x00, 0x00, 0x01, 0x01, 0x00, 0x00, 0x00 },
{ 0x00, 0x00, 0x04, 0x05, 0x05, 0x04, 0x00, 0x00 },
{ 0x00, 0x10, 0x14, 0x15, 0x15, 0x14, 0x10, 0x00 },
{ 0x40, 0x50, 0x54, 0x55, 0x55, 0x54, 0x50, 0x40 },
};
void setup()
{
lc.shutdown(0, false); //MAX72XX is in power-saving mode at startup
lc.setIntensity(0, 8); //Set the brightness to its maximum value
lc.clearDisplay(0); //Clear display
pinMode(TrigPin, OUTPUT); //Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
Serial.begin(9600);
}
void loop()
{
distance = checkdistance();
Serial.println(distance);
if (distance < 15)
{
temp = 0;
}
else if (distance < 30 && distance > 15)
{
temp = 1;
}
else if (distance < 40 && distance > 30)
{
temp = 2;
}
else if (distance > 50)
{
temp = 3;
}
for (int i = 0; i < 8; i++)
{
lc.setRow(0, i, data_val[temp][i]);
}
}
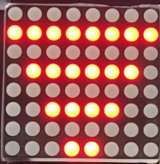
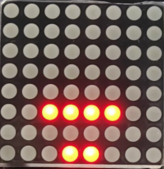
5. Risultato del Test
Dopo aver collegato i cavi e caricato il codice, verranno visualizzate delle linee sulla matrice di punti. Se la distanza rilevata è inferiore a 50 cm, ci saranno meno linee.