Progetto 28 Cancello Intelligente
1. Descrizione
Il cancello intelligente è un sistema di parcheggio intelligente che integra MCU e sensore a ultrasuoni, il quale controlla automaticamente il cancello in base alla distanza delle auto, per gestire meglio l’accesso dei veicoli.
Quando viene raggiunta una certa distanza, la MCU riceve il segnale dal sensore e stima la distanza tramite l’intensità del segnale. Se l’auto si sta avvicinando o allontanando, la MCU aprirà o chiuderà il cancello tramite un servo.
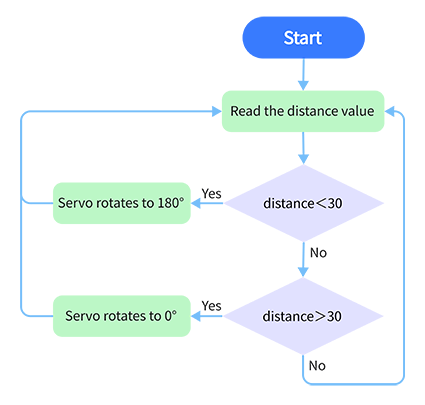
2. Diagramma di flusso
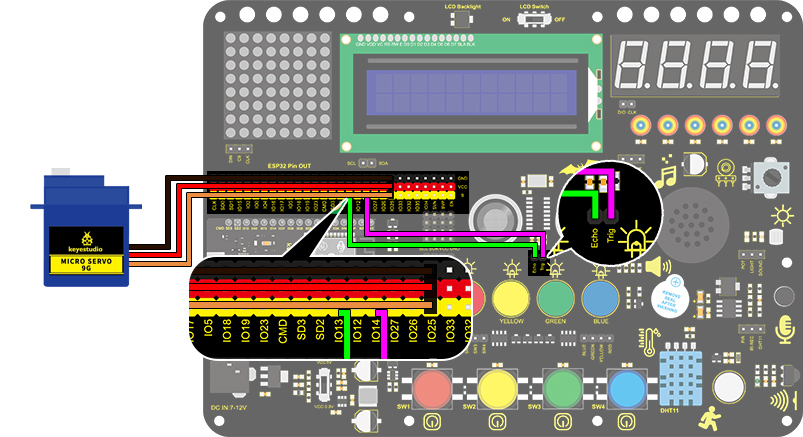
3. Schema di collegamento
4. Codice di test
/*
keyestudio ESP32 Inventor Learning Kit
Project 28 Intelligent Gate
http://www.keyestudio.com
*/
#define servo_pin 25
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
//Ultrasonic ranging program
float checkdistance() { //Acquire distance
//preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
//Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
//Servo rotation program
void Set_Angle(int angle_val) //Impulse function
{
int pulsewidth = map(angle_val, 0, 180, 500, 2500); //Map Angle to pulse width
for (int i = 0; i < 10; i++) { //Output a few more pulses
digitalWrite(servo_pin, HIGH);//Set the servo interface level to high
delayMicroseconds(pulsewidth);//The number of microseconds of delayed pulse width value
digitalWrite(servo_pin, LOW);//Lower the level of servo interface
delay(20 - pulsewidth / 1000); //Add the bracket
}
}
void setup()
{
// put your setup code here, to run once:
pinMode(servo_pin,OUTPUT);
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop()
{
// put your main code here, to run repeatedly:
distance = checkdistance();
Serial.println();
if(distance < 30)
{
Set_Angle(180);
delay(5000);//Wait for 5s
}
if(distance > 30)
{
Set_Angle(0);
}
}
5. Risultato del test
Dopo aver collegato i cavi e caricato il codice, il servo ruoterà a 180° per 5 secondi se la distanza rilevata è inferiore a 30 cm. Al contrario, il servo ruoterà a 0°.